Развојем технологија, посебно у роботској технологији, роботи превладавају у многим апликацијама. Неки од њих су врло ризичног типа и опасних подручја. Војне апликације и апликације на бојном пољу сада повећавају употребу робота у неким кључним и сложеним задацима. У једном од својих чланака описао сам употребу робота као шпијуна у војним операцијама. Е сад, шта ако постоји потреба за одбраном роботско возило или напад робота? Ту долази потреба за роботом уграђеним у механизам напада. Један такав пример је роботско возило са ЛАСЕР пиштољем.

РФ контролисано роботско возило са ласерским распоредом зрака
Такав робот се у основи користи у војним операцијама, а такође и саобраћајна полиција за откривање брзине кретања возила.
Пре него што пређемо на детаље о роботима са ласерским пиштољем, хајде да на брзину схватимо ЛАСЕР као оружје.
ЛАСЕР (Појачање светлости стимулацијском емисијом) сноп је једносмерно јако фокусирано светло за разлику од оног из обичне сијалице. Састоји се од синхронизованих корита и гребена, тј. Таласи се не мешају једни с другима. Ово даје јако фокусирану светлост врло велике снаге реда величине 1000 до 1 милион пута већу од типичне сијалице. То је уређај који контролише емисију и апсорпцију фотона пумпањем довољних количина енергије. У томе се извор фотона појачава у сноп светлости. Таласна дужина ових ласера варира у различитим спектрима попут видљивог, инфрацрвеног и ултраљубичастог.
Принцип који стоји иза ЛАСЕР-а врти се око три ствари, а то су апсорпција, спонтана емисија и стимулисана емисија. Одговарајућа количина енергије из фотона ступа у интеракцију са атомом, због чега атом прелази из нижег у више енергетско стање. Овај атом се враћа у стање ниже енергије емитујући фотон који се назива спонтана емисија. У стимулисаној емисији подразумева се ослобађање енергије из атома вештачким путем. тако да фотон реагује са побуђеним атомом, има исту енергију и поларизацију као и инцидентни фотон.
Сада ћемо погледати хардверске делове робота
- База: Основа таквог робота може бити било које кубично тело са точкићима причвршћеним за његово кретање.
- Једносмерни мотор: Робот се састоји од два једносмерна мотора која покрећу покретачи мотора и пружа потребно кретање роботу.
- Контролна јединица: Кретање робота контролише се помоћу РФ комуникационог модула. Предајник се састоји од тастера, микроконтролера, декодера и РФ предајника, док се пријемничка јединица уграђена у робота састоји од кодера и РФ пријемничког модула за контролу роботско кретање .
- ЛАСЕР пиштољ: ЛАСЕР пиштољ је постављен на робота који извршава главни задатак робота.
Кратко завиривање у роботе који раде
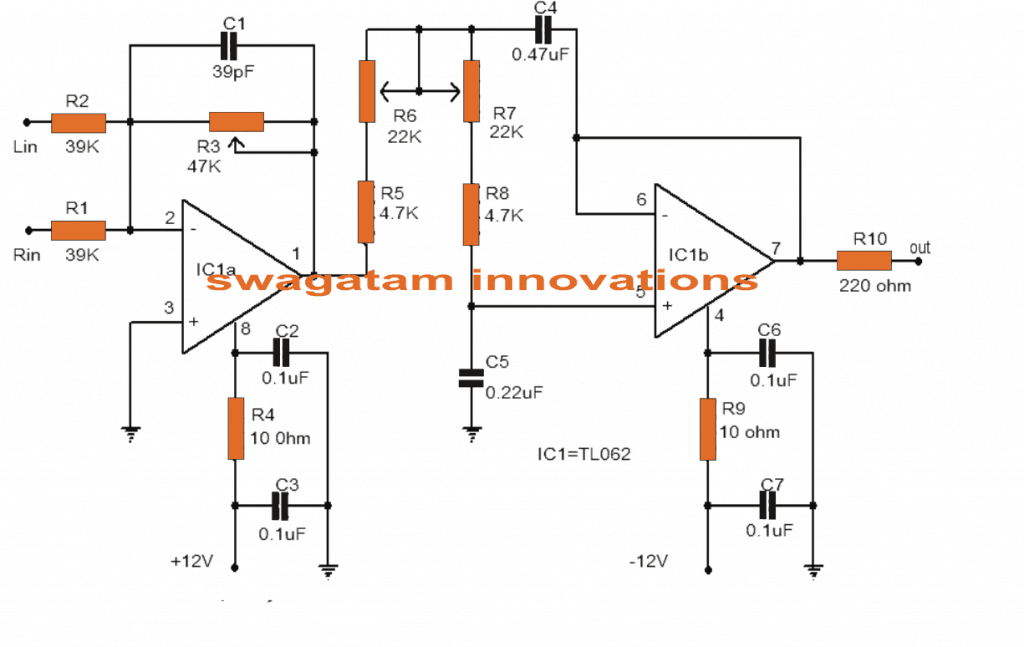
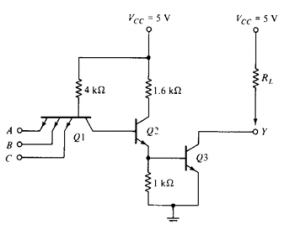
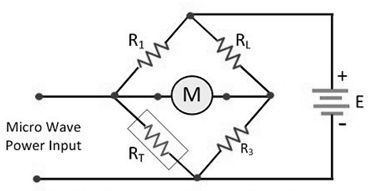
Робот док се креће у потребном правцу пуца из светлосног снопа из ЛАСЕР-овог топа који може или наштетити циљу или само створити место за откривање циља. ЛАСЕР треба да покрећу неки извори енергије. У једноставном прототипском дизајну који користи основну ЛАСЕР оловку, уређај покреће транзистор који делује као прекидач. Транзистор прима сигнал ниске логике од микроконтролера и у искљученом је стању, чинећи ЛАСЕР модул директно повезаним на напајање од 5 В.

Ласерска пушка коју покреће транзистор ради као претварач
Управљање роботом
Да би се контролисало кретање робота, потребно је контролисати рад мотора. То се може постићи коришћењем РФ-управљаног рада покретача мотора. Команде се преносе помоћу РФ предајника на некој јединици растојања око 200 метара и прима их РФ пријемник за погон мотора.
Предајничка јединица се састоји од неколико тастера који делују као командни прекидачи за померање робота у било ком жељеном смеру. Тастери су повезани са микроконтролером, који је програмиран за слање података у паралелном облику на основу уноса дугмета, кодеру. Давач претвара ове паралелне податке у серијски облик и ти серијски подаци се преносе помоћу антене модулом РФ предајника.

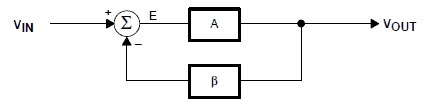
Блок дијаграм који приказује одељак предајника
Пријемна јединица се састоји од РФ пријемничког модула који прима модулисани сигнал и демодулира га. Декодер прима демодулирани сигнал у серијском облику и претвара га у паралелни облик. Микроконтролер прима сигнале и у складу с тим управља управљачким програмом мотора. Возач мотора који се користи у ЛМ293Д који може истовремено да контролише 2 мотора.

Блок дијаграм који приказује одељак пријемника
Тако помоћу РФ комуникације можемо да контролишемо робота.
У горњим описима дао сам кратку идеју о једноставном прототипу роботског возила са ЛАСЕР снопом. У стварним апликацијама, обично се користе системи за комуникацију великог домета попут ГСМ или ДТМФ за управљање роботом са удаљених места.
3 примене роботског возила са ласерским пиштољем:
- Детекција циља : Роботско возило може да користи ЛАСЕР-сноп како би на месту поставило место, тако да је лако видљиво и да се може циљати. Пример је Аир Борне ЛАСЕР.
- Уништавање мета : Јак Ласерски зрак фреквенције од 95 ГХз може изазвати осећај сагоревања у људском телу док продире у кожу за 1/64тхинча и енергија зрака може загрејати молекуле воде у телу. Пример је систем активног порицања који су развиле САД.
- Проналазач циља и откривање брзине : ЛАСЕР-сноп из роботског возила може се користити за проналажење домета циља по принципу ЛАСЕР-овог одбијања светлости, а такође се може израчунати и брзина циља након што добијемо домет.
Дакле, сада имамо кратку идеју о томе да су роботи користили детектор и разарач мета. Да ли то има користи од нормалне јавности осим за војску? Размислите и одговорите.