У самом периоду 1840-их, развој линеарног асинхроног мотора започео је Цхарлес Вхеатстоне из Лондона, али изгледа да је ово непрактично. Док је 1935. године оперативни модел развио Херманн Кемпер, а оперативну верзију у пуној величини увео је Ериц 1940. године. Затим је овај уређај био коришћен у многим апликацијама у многим индустријама. Овај чланак јасно објашњава Линеар Индукциони мотор , његов принцип рада, перформансе, дизајн, конструкција, предности и недостаци и главне примене. Заронимо у концепт.
Шта је линеарни асинхрони мотор?
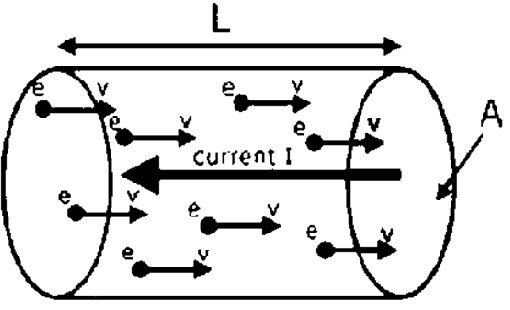
Линеарни индукциони мотор је скраћено ЛИМ и ово је побољшана верзија ротационог асинхроног мотора где је излаз линеарно транслационо кретање на месту ротационог кретања. Овај уређај генерише линеарно кретање и силу осим обртног момента. Дизајн и функционалност линеарног индукција мотор се може приказати на доњој слици стварањем радикално обликованог реза у обртној индукцији и тако нивелисањем пресека.
Излаз је изравнани статор или горња страна са гвожђем пресвученим ламинатима где ови носе трофазни намотај више полова са проводницима који су у 900углови на правац кретања. Такође се састоји од намотаја затвореног веверицом, док је углавном укључен у бескрајни лим направљен од алуминијума или бакра који се држи на чврстом позлаћеном гвозденом носачу.
Без обзира на назив уређаја, сви линеарни асинхрони мотори не генеришу линеарно кретање, мало уређаја који генеришу се користи за испоручивање обртаја великих пречника, а употреба бескрајних примарних делова је скупља.
Дизајн
Темељна конструкција и дизајн линеарног асинхроног мотора готово одговарају исто као трофазна индукција мотора, иако се не чини као код нормалног асинхроног мотора. Када се у статорском делу полифазног асинхроног мотора формира рез и постави на равну површину, тада се ствара примарни пресек линеарног асинхроног мотора. На исти начин, када се пресек ос формира у делу ротора вишефазног асинхроног мотора и постави на равну површину, тада се ствара секундарни пресек линеарног асинхроног мотора.
Конструкција линеарног индукционог мотора Поред овог, постоји још један модел линеарног асинхроног мотора који се користи за побољшање перформанси и то под називом ДЛИМ, који је двострани линеарни асинхрони мотор. Овај модел има примарни одељак који је постављен на други крај секундарног одељка. Овај дизајн се користи за побољшање искоришћења флукса и на примарној и на секундарној страни. Ово је конструкција линеарног асинхроног мотора .
Принцип рада линеарног асинхроног мотора
Доњи одељак даје јасно објашњење рад линеарног асинхроног мотора .
Овде, када се примарни део мотора напаја уравнотеженом трофазном снагом, тада ће доћи до кретања флукса по целој дужини примарног дела. Ово линеарно кретање магнетног поља једнако је обртном магнетном пољу у одељку статора трофазног асинхроног мотора.
Овим ће доћи до индукције електричне струје у проводницима секундарног намотаја због упоредног кретања између проводника и кретање флукса . Индукована струја доводи у везу са кретањем флукса да би произвела било линеарни потисак силе и то показује
Вс = 2тфс м / сек
Када је примарни пресек константан, а други део има кретање, тада сила повлачи секундарни део у свом правцу, што резултира генерисањем неопходног праволинијског кретања. Када се систему обезбеди напајање, генерисано поље ће пружити линеарно покретно поље где је брзина представљена према горе поменутој једначини.
У једначини, „фс“ одговара количини мере учестаности напајања у Хз
„Вс“ одговара линеарном покретном пољу измереном у м / сек
„Т“ одговара кораку линеарног пола, што значи растојање између пола до пола измерено у метрима
В = (1-с) Вс
У складу са истим образложењем, у стању асинхроног мотора, секундарни клизач не држи исту брзину као вредност брзине магнетно поље . Због тога долази до клизања.
Тхе дијаграм линеарног асинхроног мотора приказано је на следећи начин:

Карактеристике линеарног асинхроног мотора
Неколико карактеристика ЛИМ-а су:
Крајњи ефекат
За разлику од типа кружне индукције мотора, ЛИМ има карактеристику звану „Крајњи ефекат“. Крајњи ефекат се састоји од губитака у ефикасности и перформансама који су последица магнетне енергије која се односи и спушта на крају примарног дела релативним кретањем примарног и секундарног дела.
Чини се да је само код секундарног дела функционалност уређаја иста као код ротационе машине, захтева се да је удаљена готово два пола, али да има минимално примарно смањење потиска које се дешава при малом клизању, али је или 8 или више мотке дуже. Уз постојање крајњих ефеката, ЛИМ уређаји немају способност покретања светлости, док општа врста индукционих мотора задржава ову способност управљања мотором који има ближе синхроно поље под околностима минималног оптерећења. Супротно томе, крајњи ефекат генерише одговарајуће губитке код линеарних мотора.
Потисак
Погон који узрокују ЛИМ уређаји готово је исти као и погон општих асинхроних мотора. Ове погонске силе представљају приближно исту карактеристичну криву исту као и клизање, иако су модулисане крајњим ефектима. Ово се такође назива вучним напором. Приказује га
Ф = Пг / Вс мерено у Њутнима
Левитација
Даље, за разлику од ротационог мотора, ЛИМ уређаји имају електродинамичку силу левитације која има нулту вредност очитавања на ‘0’ клизању и то генерише приближно фиксну количину зазора када се клизање појача у било ком смеру. То се дешава само код једностраних мотора и ова карактеристика се генерално неће догодити када се за секундарни део користи гвоздена потпорна плоча, јер то ствара привлачност која превазилази притисак подизања.
Трансверсе Едге Еффецт
Линеарни индукциони мотори такође показују ефекат попречне ивице, који значи да тренутни путеви који су у истом смеру кретања развијају губитке и због тих путања доћи ће до смањења ефективног потиска. Као што се догађа због овог ефекта попречне ивице.
Перформансе
Тхе перформансе линеарног асинхроног мотора може бити позната по доле објашњеној теорији где је синхрона брзина покретног таласа представљена са
Вс = 2ф (корица линеарног пола) …… ..м / с
„Ф“ одговара испорученој фреквенцији измереној у херцима
У случају ротационог асинхроног мотора, брзина секундарног дела у ЛИМ је мања од брзине синхроне брзине и дата је са
Вр = Вс (1-с), ‘с’ је ЛИМ клизање и јесте
С = (Вс - Вр) / Вс
Линеарна сила је дата са
Ф = снага ваздушног зазора / Вс
Облик криве брзине потиска ЛИМ је готово идентичан оном на кривуљи обртног момента в / с ротационог асинхроног мотора. Када постоји поређење између ЛИМ и ротационог асинхроног мотора, линеарном асинхроном мотору је потребан повећани ваздушни размак и због тога ће доћи до повећане магнетизујуће струје, а фактори попут перформанси и фактора снаге биће минимални.
У случају РИМ, површина статора и ротора је слична, док је у ЛИМ једна краћа од друге. Сталном брзином краћи одсек ће имати континуирани пролаз од оног другог.
Предности и мане
Тхе предности линеарног асинхроног мотора су:
Кључне предности ЛИМ-а су:
- У тренутку склапања не постоје магнетне привлачне силе. Из разлога што ЛИМ уређаји немају трајне магнете, у тренутку склапања система не постоји сила привлачења.
- Линеарни асинхрони мотори такође имају предност путовања дужине. Ови уређаји се углавном примењују за велике дужине, јер секундарни делови нису укључени у трајне магнете. Непостојање магнета у другом одељку омогућава да ови уређаји не буду скупи јер цена уређаја пресудно лежи у развоју магнетне стазе.
- Ефикасно корисно у тешке сврхе. Линеарни асинхрони мотори се првенствено користе у линеарним моторним условима високог притиска, где су присутни са стабилном снагом од скоро 25гмс убрзања и неких стотина килограма.
Тхе недостаци линеарног асинхроног мотора су:
- Конструкција ЛИМ уређаја је донекле сложена јер захтевају софистициране алгоритме управљања.
- То је повећало привлачне снаге у време операције.
- Не показује силу у тренутку мировања.
- Побољшана физичка величина уређаја значи да је величина паковања већа.
- Потребна је већа снага за функционалност. У поређењу са линеарним моторима са перманентним магнетима, ефикасност је мања и генерише више топлоте. За ово су даље потребни уређаји за хлађење водом који ће бити укључени у конструкцију.
Примене линеарног асинхроног мотора
Ексклузивна употреба линеарних асинхроних мотора може се наћи у применама попут
- Металне транспортне траке
- Опрема за механичко управљање
- Покретачи за велике брзине прекидача
- Апликације за појачавање шатла
У целини, овде се ради о концепту линеарних индукционих мотора. Овај чланак је пружио јасно објашњење принципа линеарног асинхроног мотора, дизајна, рада, употребе, предности и недостатке. Даље је неопходно знати како је брзина в / с нагиб пола карактеристике линеарног асинхроног мотора изводити?