Робот за одабир и постављање је онај који се користи за подизање предмета и постављање на жељено место. То може бити цилиндрични робот који омогућава кретање у хоризонталној, вертикалној и ротационој оси, сферни робот који пружа два ротацијска и један линеарни покрет, зглобни робот или робот скара (фиксни роботи са 3 вертикалне ротационе руке оси).
Предности
Пре него што кренемо даље, погледајмо неколико разлога зашто се преферирају роботи за одабир и постављање:
- Бржи су и посао могу обавити за неколико секунди у поређењу са људским колегама.
- Они су флексибилни и имају одговарајући дизајн.
- Тачни су.
- Повећавају сигурност радног окружења и заправо се никада не умарају.
Делови робота Пицк Н Плаце

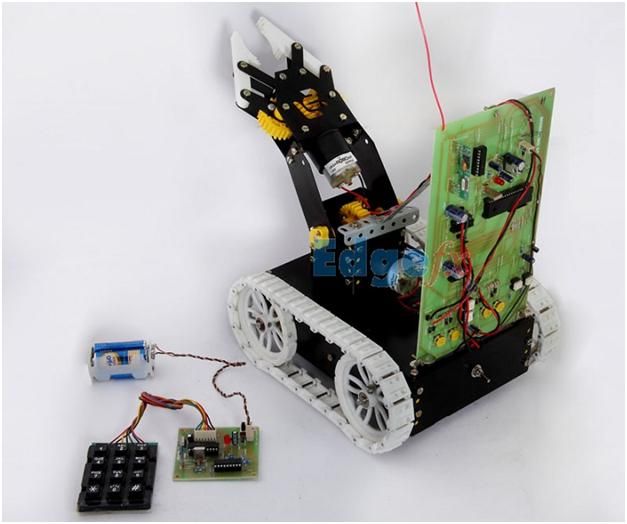
Пицк Н Плаце Робот
Погледајмо од чега се заправо састоји робот за одабир и постављање:
- За Ровер : То је главно тело робота које се састоји од неколико крутих тела попут цилиндра или кугле, зглобова и карика. Такође је познат и као манипулатор.
- Крајњи ефектор : То је тело повезано са последњим спојем ровера које се користи за хватање или руковање предметима. То може бити аналогија с руком људског бића.
- Актуатори : Они су покретачи робота. Заправо покреће робота. То може бити било који мотор попут серво мотора, корачног мотора или пнеуматских или хидрауличних цилиндара.
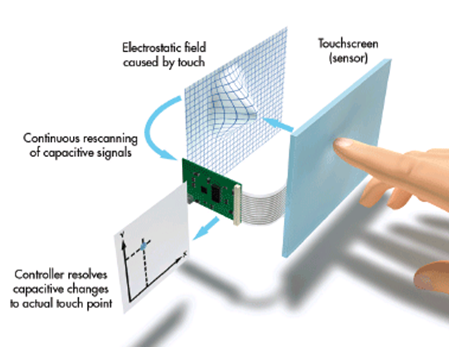
- Сензори: Користе се за откривање унутрашњег као и спољашњег стања како би се осигурало да робот несметано функционише у целини. Сензори укључују сензоре додира, ИР сензор итд.
- Контролер : Користи се за управљање актуаторима на основу повратне спреге сензора и на тај начин контролише кретање сваког зглоба и на крају кретање крајњег ефектора.
Рад основног робота Пицк Н Плаце:
Основна функција а изаберите и поставите робота врши се њеним зглобовима. Зглобови су аналогни људским зглобовима и користе се за спајање два узастопна крута тела у роботу. Могу бити ротациони или линеарни. Да бисмо додали зглоб било којој карики робота, морамо знати о степену слободе и степену кретања тог дела тела. Степени слободе спроводе линеарно и ротационо кретање тела, а степени кретања подразумевају број оси које тело може да помери.

Једноставан робот Н Пицк Н Плаце
Једноставан робот за подизање и постављање састоји се од два крута тела на покретној основи, повезаних заједно са ротационим зглобом. Ротацијски зглоб је онај који омогућава ротацију у 360 степени око било које од осе.
- Дно или основа су причвршћени точковима који омогућавају линеарно кретање.
- Тхе 1сткруто тело је фиксирано и подупире друго круто тело којем је обезбеђен крајњи ефектор.
- Тхе 2ндкруто тело има покрет у све 3 осе и има 3 степена слободе. Повезан је са 1сттело са ротационим зглобом.
- Крајњи ефектор треба да прими свих 6 степени слободе, како би достигао све стране компоненте, заузео положај на било којој висини.
У целини, основни робот за одабир и постављање ради на следећи начин:
- Точкови испод основе помажу у померању робота на жељено место.
- Чврсто тело које подупире крајњи ефектор савија се или исправља да би дошло до положаја на којем је предмет постављен.
- Крајњи ефектор снажно хвата предмет и поставља га у жељени положај.
Сад кад смо добили кратку идеју о роботу за одабир и постављање, основно питање је како се он заправо контролише.
Једноставним роботом за одабир и постављање може се управљати контролом кретања његовог крајњег ефектора. Кретање се може користити хидрауличким кретањем, тј. Коришћењем хидрауличне течности под притиском за погон робота или пнеуматским кретањем, односно коришћењем ваздуха под притиском да би се изазвало механичко кретање. Међутим, најефикаснији начин је коришћење мотора за обезбеђивање потребног кретања. Мотори морају да се контролишу како би се омогућило потребно кретање робота и крајњег ефектора.
Радни пример управљања роботом Пицк Н Плаце
Шта кажете на контролу робота са само неколико тастера на тастатури? Да, могуће је! Само притиском на потребно дугме, роботу можемо пренети команду да се креће у било ком смеру да би постигао наш задатак. Штавише, то се може постићи једноставном бежичном комуникацијом.
Погледајмо како ово заправо функционише:
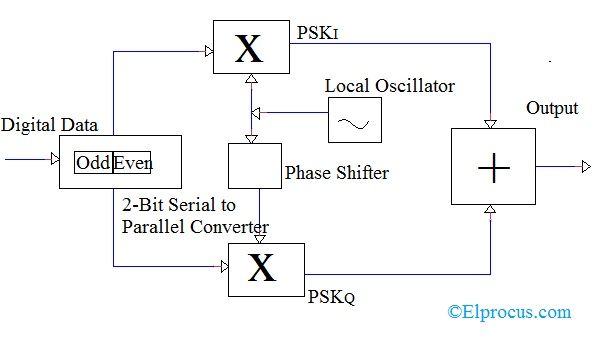
Део предајника састоји се од тастатуре повезане са микроконтролером. Било који број дугмета у децималном формату микроконтролер претвара у бинарни четвороцифрени број и паралелни излаз на једном од његових прикључака примењује се на кодер. Давач претвара ове паралелне податке у серијске податке и они се достављају на предајник, опремљен антеном за пренос серијских података.

Блок дијаграм који приказује предајник робота Пицк Н Плаце
Пријемна страна се састоји од декодера повезаног са микроконтролером. Декодер претвара примљену наредбу у серијском формату у паралелни облик и даје ове податке микроконтролеру. На основу ове наредбе микроконтролер шаље одговарајуће улазне сигнале покретачима мотора за погон одговарајућих мотора.

Блок дијаграм који приказује пријемник робота Пицк Н Плаце
Систем се састоји од два мотора за омогућавање кретања целог робота и два друга мотора за кретање руке. Крајњим ефектором или хватаљком треба контролисати да би извршили одговарајући притисак на предмет да би се њиме ефикасно руковало, да би му се меко држање . То се осигурава управљањем мотором руку помоћу одговарајуће команде. Излаз из ручних мотора повезан је на отпорник од 10Охмс / 2В и у тренутку преоптерећења или закључаног стања мотора развија се високи напон на отпорнику, што узрокује логички висок ниво на излазу оптичког изолатора и прекида пин микроконтролера повезан на излаз оптоизолатора преко пнп транзистора добија логички низак сигнал, што зауставља све остале операције хватаљке.
Тако једноставном РФ комуникацијом можемо заправо да контролишемо робота за одабир и постављање.
Практичне примене робота за избор и постављање:
- Апликације за одбрану : Може се користити за надзор, а такође и за прикупљање штетних предмета попут бомби и њихово сигурно ширење.
- Индустријске примене : Ови роботи се користе у производњи да би покупили потребне делове и поставили их у правилан положај да би завршили причвршћивање машина. Такође се може користити за постављање предмета на транспортну траку, као и за преузимање неисправних производа са транспортне траке.
- Медицинске примене : Ови роботи се могу користити у разним хируршким операцијама, попут операција замене зглобова, ортопедских и интерних операција. Операције изводи са више прецизности и тачности.
Осим ових апликација, ови роботи се могу користити и у разним другим апликацијама погодним за човечанство.
Сада остаје питање - докле је стигао дан када ће роботи потпуно олакшати пут људима?