
Увод:
Данас многе индустрије користе роботе због високог нивоа перформанси и поузданости, што је одлична помоћ за људе. Роботика за избегавање препрека користи се за откривање препрека и избегавање судара. Ово је аутономни робот. Дизајн робота за избегавање препрека захтева интеграцију многих сензора у складу са њиховим задатком.
Откривање препрека је примарни захтев овог аутономног робота. Робот информације из околине добија путем монтираних сензора на роботу. Неки сензорски уређаји који се користе за откривање препрека попут сензора удараца, инфрацрвених сензора, ултразвучних сензора итд. Ултразвучни сензор је најприкладнији за откривање препрека, јефтин је и има велику могућност домета.

Роботско возило за избегавање препрека
Принцип рада:
Избегавање препрека роботско возило за своје покрете користи ултразвучне сензоре. За постизање жељене операције користи се микроконтролер од 8051 породице. Мотори су повезани преко управљачког склопа мотора са микроконтролером. Ултразвучни сензор је причвршћен испред робота.
Кад год робот иде жељеном путањом, ултразвучни сензор непрекидно преноси ултразвучне таласе са своје главе сензора. Кад год препрека наиђе на њу, ултразвучни таласи се одбијају од објекта и те информације се прослеђују микроконтролеру. Микроконтролер контролише моторе лево, десно, позади, напред, на основу ултразвучних сигнала. За контролу брзине сваког мотора користи се модулација ширине импулса (ПВМ).

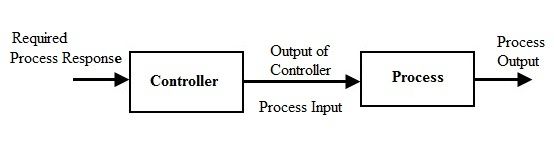
Блок дијаграм Роботско возило за избегавање препрека
Различити сензори који се користе за избегавање препрека Роботско возило
1. Откривање препрека (ИР сензор):
ИР сензори се користе за откривање препрека. Излазни сигнал сензора шаље микроконтролеру. Микроконтролер управља возилом (напред / назад / заустављање) помоћу једносмерног мотора који је смештен у возило. Ако било која препрека постављена у линији, ИЦ сензор не прима светлосне зраке и даје сигнале микроконтролеру. Микроконтролер ће одмах зауставити возило и сирена ће се укључити. После једног минута робот ће проверити статус путање ако је препрека уклоњена, робот се удаљава од речи, иначе ће се робот вратити на померање почетног места. Сензор открива предмете емитујући кратки ултразвучни рафал и затим ослушкујући еколошки ефекат. Под контролом главног микроконтролера, сензор емитује кратку експлозију од 40 кХз. Ова експлозија се одважи или путује кроз ваздух и погоди чланак, а након тога се поново одбије до сензора. Сензор пружа излазни импулс хосту који ће се прекинути када се детектује ехо, па се тако у прорачун узима програм како би се пружили резултати на удаљености од објекта.
два. Откривање путање (сензор близине):
Уобичајени узрок су како сензори који дају смернице, тако и робот прате га идући право на стазу. Када се линија у то време заврши, робот се окреће на 180 и враћа се на исто место.

Бити на мрежи
Сензори близине се користе за откривање путање. Када десни сензор није откривен у кривој линији, микроконтролер активира леви мотор да скрене лево све док се не огласи сигнал са десног сензора. Једном када се сигнал препозна десним сензором, два мотора се активирају да иду напред. Када се линија у то време заврши, робот се окреће на 180 и враћа се на исто место.

Изгубити линију
3. Ултразвучни сензор:
Ултразвучни сензор се користи за откривање препрека. Ултразвучни сензор преноси ултразвучне таласе са главе сензора и поново прима ултразвучне таласе који се одбијају од предмета.
Много је примена које користе ултразвучне сензоре попут алармних система са инструкцијама, аутоматских отварача врата итд. Ултразвучни сензор је врло компактан и има врло високе перформансе.

Општи дијаграм ултразвучног сензора
Принцип рада:
Ултразвучни сензор емитује кратки и високофреквентни сигнал. Они се шире у ваздуху брзином звука. Ако погодију било који предмет, онда одбијају сигнал еха на сензору. Ултразвучни сензор се састоји од мултивибратора, причвршћеног за базу. Мултивибратор је комбинација резонатора и вибратора. Резонатор испоручује ултразвучни талас генерисан вибрацијама. Ултразвучни сензор се састоји од два дела емитера који производи звучни талас од 40 кХз, а детектор детектује звучни талас од 40 кХз и шаље електрични сигнал натраг микроконтролеру.

Ултразвучни принцип рада
Ултразвучни сензор омогућава роботу да виртуелно види и препозна предмет, избегне препреке, измери удаљеност. Опсег рада ултразвучног сензора је од 10 цм до 30 цм.
Рад ултразвучног сензора:
Када се на ултразвучни претварач примени електрични импулс високог напона, он вибрира кроз одређени спектар фреквенција и генерише рафал звучних таласа. Кад год било која препрека дође испред ултразвучног сензора, звучни таласи ће се одразити у облику одјека и генеришу електрични импулс. Израчунава време потребно између слања звучних таласа и пријема одјека. Обрасци одјека ће се упоређивати са узорцима звучних таласа како би се утврдило стање откривеног сигнала.
Белешка: Ултразвучни пријемник ће детектовати сигнал ултразвучног предајника док преносни таласи ударају о предмет. Комбинација ова два сензора омогућиће роботу да открије објекат на путу. Ултразвучни сензор је причвршћен испред робота и тај сензор ће такође помоћи роботу да се креће кроз ходник било које зграде.
Примене ултразвучног сензора:
- Аутоматска промена саобраћајне сигнализације
- Алармни систем против уљеза
- Прекидачи за бројање инструмената за бројање паркинг бројила
- Сонар аутомобила назад
Карактеристике ултразвучног сензора:
- Компактан и лаган
- Висока осетљивост и висок притисак
- Висока поузданост
- Потрошња енергије од 20мА
- Пулсе ин / оут комуникација
- Уски прихватни угао
- Пружа тачне, бесконтактне процене раздвајања унутар 2 цм до 3 м
- ЛЕД тачке експлозије приказује процене напретка
- 3-пинско заглавље поједностављује повезивање помоћу серво развојне везе
Примене роботског возила за избегавање препрека:
- Нарочито војне примене
- Може се користити за градске ратове
Сада смо јасно добили идеју о концепту роботског возила помоћу ултразвучног сензора за откривање препрека ако још нека питања о овој теми или концепту електричних и електронских пројеката оставе коментаре у наставку.
Фото кредит:
- Општи дијаграм ултразвучног сензора Летсмакероботс
- Принцип рада ултразвучног сензора Мицросониц






![4 једноставна круга преклопних кругова [тестирано]](https://electronics.jf-parede.pt/img/4017-ic-circuits/21/4-simple-clap-switch-circuits.png)

{kind=link}