Пост објашњава једноставно линијско ласерско контролисано коло возача мотора, које реагује на прецизну хоризонталну ласерску линију, генерисану из линијског ласерског уређаја, и аутоматски прилагођава поравнање повезаног алата или посао са крајњим савршенством и тачношћу.
Шта је Лине Ласер
Линијска ласерска опрема високо прецизна је електронска замена тесара, старог поравнања либеле.
Линијски ласерски уређај је заправо напредна опрема која емитује ласер која може да генерише 360 ° високо прецизна осветљена хоризонтална ласерска линија, за пружање калибрационе референце за све индустријске или грађевинске инжењерске послове, тако да је крајњи резултат посла савршено раван и поравнат без и најмање грешке.
Коло је затражио један од посвећених читалаца овог блога, господин Рафал.
Детаљне расправе у вези са поступком рада линијског мотора са ласерским управљањем могу се научити из следећих параграфа:
Циљ дизајна
Господин. Рафал: Врло сам нов у овоме. Истражио сам последњих неколико недеља и нисам пронашао тачно оно што ми треба.
Бићу вам захвалан на било каквој помоћи. Прилажем фотографију своје идеје. Желим да контролишем два мотора од 12 В једносмерне струје ласерским нивоом.
Линијски ласерски ниво сигнализираће пријемницима.

Овај сигнал ће тада морати да контролише правац мотора од 12 В једносмерне струје. Мотор окреће навојну шипку напред-назад да би подесио висину алата.
Према ономе што сам открио, постојало би неколико паралелно повезаних фотодиода, једна постављена за откривање ласера изнад нултог нивоа, а друга испод тог нивоа. Нулти ниво је само нека врста паузе између фотодиода да се систем не пробуди. Ласерски сензор без екрана. Дао сам само сликовиту фотографију.
Потребан ми је Х мост, али све што сам пронашао треба да се користи са Ардуино системом. Ако је потребно, могу да купим готов мост по разумној цени до 30 долара
У идеалном случају ово би функционисало и са црвеним и са зеленим ласерима, али су таласне дужине толико различите да сумњам да би то могло да се уради и да не би функционисало у читавом спектру светлости.
У почетку бих желео да подесим ниво овог снопа причвршћеног на моторе помоћу тастера горе-доле. Било би ми драго да се други мотор тада поравна са жироскопом док га поставља, али без Ардуина би то могло бити веома тешко.
Осећам да је оно што покушавам да урадим толико једноставно да се могу извући без употребе Ардуина. И инсистирам на аналогном, због тешких услова на градилишту и чини ми се да што је више електронике, то је уређај непоузданији.
Радиће само у затвореном, а ласерска удаљеност је мак 10м. Мотор који сам нашао на почетку има велику струјну потрошњу од 200мА мак 2,19 А, али и велики обртни моменат.
Напајање 18 В једносмерне струје из Макита батерије.
Хвала унапред на било каквим предлозима.
Поздрав из Пољске
Рафал
Колебање : Имам забуну око рада вратила мотора. Вијак са навојем на оба мотора ће гурнути алат, али не може да га повуче назад? Како то иде?
Да ли је могуће применити исто са једним мотором?
Господин. Рафал: Доње равнање за равнање би било можда 70 цм, само за мале просторије, нпр. тоалет тако да можете ући кроз врата.
Машина без погона, ручно вучена, само равнала равнала. На видео снимку су два жута предмета на јарболима ласерски детектори чврсто причвршћени за исправљаче.
Ласер стоји негде даље и ствара водоравну линију.
Мотори би били причвршћени за колица и завртањ са навојем за изравнавање исправљача ласерским детекторима. Морају бити два мотора за поравнање обе стране, али то је зрцална слика.
Једини заједнички део би био двоканални Х мост као да то радим из готовог модула и можда жироскопа, али то је сан :).
Важно је да постоје тастери за окретање левог и десног мотора.
Поступак је овај. Окачим ласер на пример 2 м изнад предвиђеног нивоа пода. Одмерим 2 метра од ласерског зрака до доње ивице исправљача.
Висину регулишем притиском на дугмад на прекидачима десно-лево тако да буде једнака 2 метра доње ивице исправљача. Ставио сам детекторе на јарболе тако да је ласерски зрак на нултом нивоу између делова фотодиоде. А остало ће учинити само
У прилогу стављам цртеж рада детектора.
Рафал
Дизајн кола

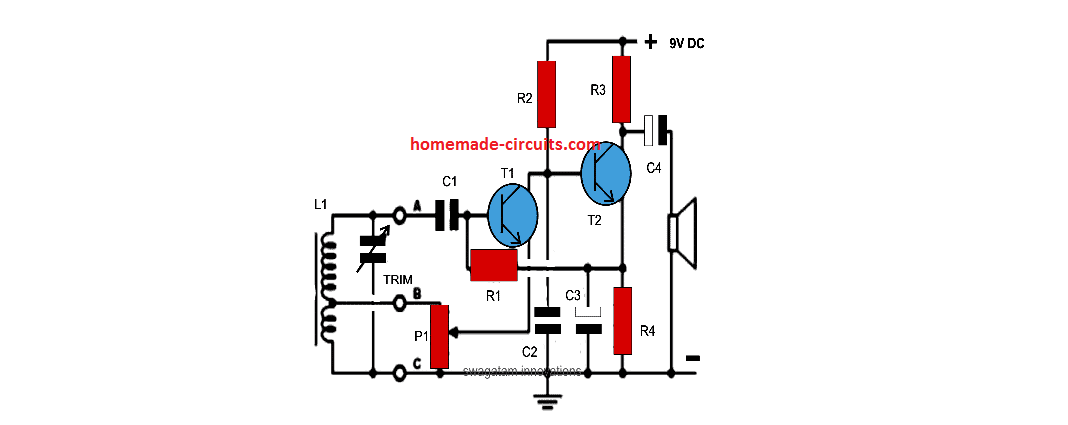
Гледајући горњу слику, биће потребне две такве идентичне фазе кола за откривање и корекцију повезаног алата којим се управља мотором с обзиром на тачност исправности ласерске линије.
Две идентичне фазе су међусобне зрцалне слике као што је приказано доле:

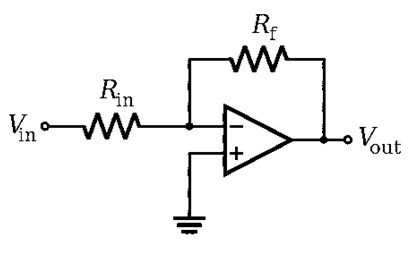
Кола су прилично једноставна. Ради са упоређивачем прозора који осигурава да погонски мотори не раде све док су пар ЛДР-ова изложени идентичној осветљености ласерске линије.
Затим се пола напона напајања генерише на неинвертујућем улазу А1 и на инвертирајућем улазу А2.
Чим се открије отклон у ласерској линији (што се може догодити ако алат који контролише мотор није поравнан право), светлина која утиче на ЛДР-ове Р1 и Р2 се мења.
У овој ситуацији, улазни напон у компаратор прозора одступа од половине напона напајања. Ова ситуација доводи до тога да излаз упоређивача наређује мрежи мостова мотора да покреће мотор у смеру кретања казаљке на сату или у смеру супротном од кретања казаљке на сату.
Транзистори Т1. . . Т4 су конфигурисани попут мостовне мреже како би се омогућило укључивање мотора напред и назад правци у зависности од осветљења ЛДР или угла одступања ласерске линије.
Диоде Д1. . . Д4 су позиционирани да поништавају вршне напоне генерисане током времена док мотор ради и ради. Функција унапред подешених потенциометара П1 и П2 је за олакшавање подешавања поравнања.
Они су фино подешени како би се осигурало да је мотор потпуно искључен и неактиван све док је одговарајући ЛДР пар изложен потпуно истој осветљености ласерског светла.
Рецимо, на пример, због неправилног поравнања алата којим управља мотор, нагиб ласерске линије доводи до смањења светлости на ЛДР Р2 него на ЛДР Р1. То ће довести до тога да напон у тачки А порасте изнад половине напона напајања.
У овој ситуацији, излаз опционог појачала А1 постаје висок, што приморава транзисторе Т1 и Т4 да раде. То заузврат доводи до окретања мотора у одговарајућем смеру. Ова радња аутоматски помера повезани алат у правој линији све док се његова тачност хоризонталног поравнања не поклапа са тачношћу ласерске линије.
Супротно томе, ако претпоставимо да је алат нагнут са супротном оријентацијом тако да осветљење ЛДР-ова буде супротно горе поменутом, доводи до пада напона у тачки А испод половине напона напајања. Ово стање покреће излазно појачало А2 опционог сигнала тако да Т3 и Т2 постану оперативни.
То резултира мотором који сада ради у супротном смеру, у покушају да поправи поравнање алата у одговарајућем смеру, све док не постане савршено равно поклапајући се са хоризонталном тачношћу ласерске линије.
Дугме горе / доле
Дугмад нагоре за почетно подешавање висине либеле могу се једноставно имплементирати ожичењем прекидача са тастерима паралелно са сваким ЛДР-ом.
ЛДР инсталација
Да би ЛДР добили тачан одговор, леви десни парови морају бити инсталирани унутар цеви попут кућишта тако да могу да „виде“ само ласерско осветљење, а не и било које друго амбијентално светло.
Идеја се може видети на следећој слици:

Овде можемо видети да су ЛДР-ови позиционирани врло близу један другог, што обезбеђује да када је ласерска линија у тачном центру, неки део оба ЛДР пара буде једнообразно осветљен ласерском светлошћу.
Предња страна ЛДР кућишта може бити прекривена дифузним сочивом, тако да се ласерско осветљење може равномерно дифузовати на одговарајуће ЛДР-ове.
Претходно: Једноставни алармни круг против крађе за заштиту драгоцених предмета Даље: Универзални круг за испитивање БЈТ, ЈФЕТ, МОСФЕТ