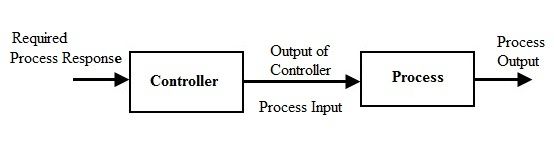
Роботи се могу користити у многим применама у индустријским, војним, домаћим производима. Једна од главних употреба робота је предност људима. Било да се ради о било каквим опасним ситуацијама попут избијања пожара или места препуног нагазних мина, роботи могу лако пронаћи начин да реше ове проблеме. Дакле, хајде да видимо ове две врсте робота - Робота који детектује мину и Робота за гашење пожара
Робот за откривање мина
Како осетити нагазне мине помоћу робота?
Једна од најважнијих примена роботике је у одбрани. Робот у војсци је возило на даљинско управљање са многим јединственим карактеристикама. То може бити роботско возило са шпијунском камером, роботско возило са ЛАСЕР пиштољем за откривање и уништавање циљева или робот са детектор метала за откривање присуства нагазних мина.
Један од традиционалних и конвенционалних начина откривања мина је употреба обучених лица која ручно претражују метале или мине помоћу детектора метала. Међутим, ово је небезбедно и скупо, а такође и споро.
Да би се превазишао овај проблем, преферира се далеко напреднији систем.
Неколико начина за откривање нагазних мина:
- Коришћење робота који може у земљу убацити сонду која може открити предмете испод тла и одредити врсту материјала.
- Коришћење робота са детектором метала који може осетити присуство проводних елемената попут нагазних мина и алармирати корисника.
Пре него што идемо даље у детаље о другом типу - тј. Роботу са детектором метала, имајмо кратки подсетник на два важна појма - нагазне мине и детектор метала.
ДО Копнена мина је експлозивна направа намјерно постављена испод земље која експлодира изазвана притиском. Према статистичком извештају, постоји око 100 милиона нагазних мина у 70 земаља света. Једном постављена нагазна мина може радити до 50 година. Зар није опасно !!

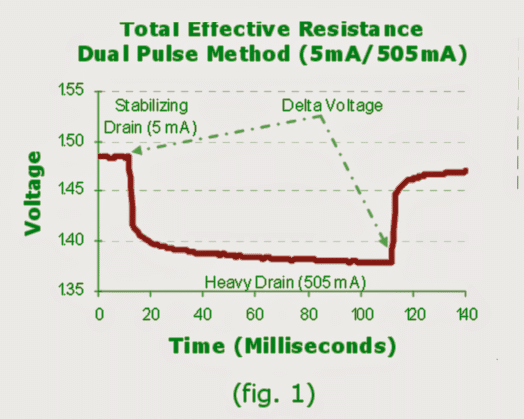
Основни детектор метала ради на принципу Фарадејевог закона индукције. Састоји се од завојнице која је под напоном да развије пулсирајуће магнетно поље око себе. Када завојница дође у близину проводљивог елемента попут метала (рудник), у њему се индукује електрична струја (вртложна струја). Индукована вртложна струја изазива развој електромагнетног поља око метала, које се поново преноси на завојницу која развија електрични сигнал који се анализира. Већа је удаљеност између калема и метала, слабије је магнетно поље.
Једноставан прототип:

Једноставан прототип роботског возила са детектором метала
Дизајнирање робота:
Роботско возило састоји се од следећих целина:
- Правоугаона основа за потпору целој структури робота, причвршћена са два точка за кретање.
- Неколико једносмерних мотора који омогућавају потребно кретање робота.
- Контролна јединица која се састоји од РФ пријемника који прима командне сигнале од предајничке јединице за управљање мотором и управљање моторима у складу с тим.
- Коло детектора метала заједно са алармом зујалице активира се након откривања метала.
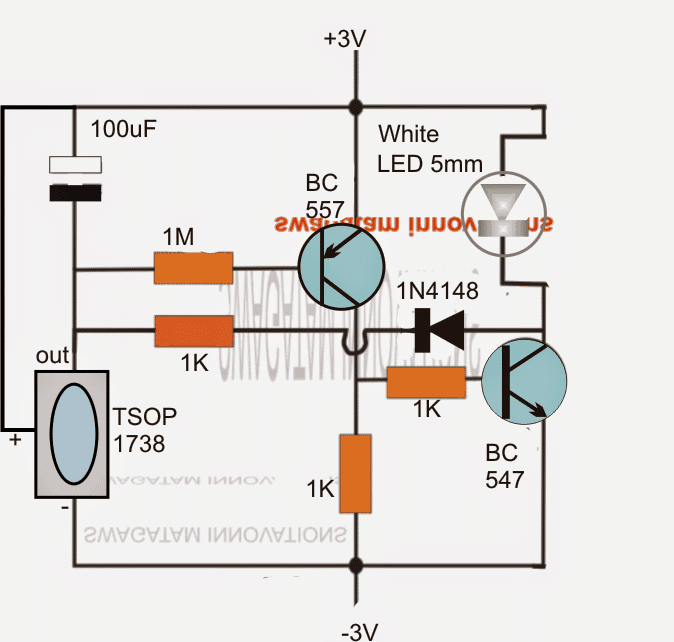
Како Робот ради:
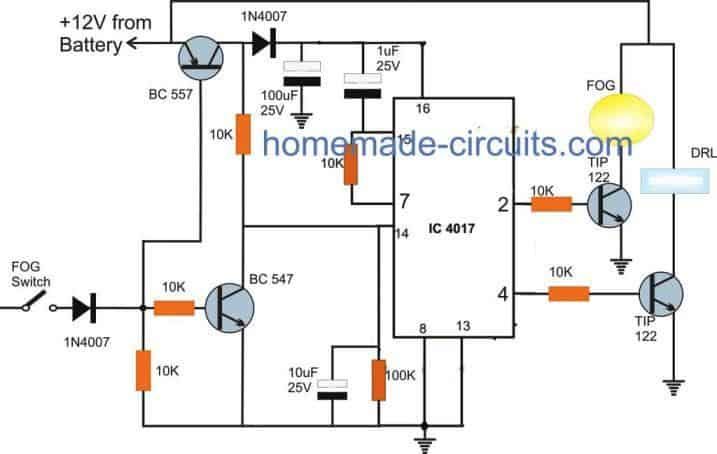
Коло детектора метала уграђено у управљачко коло робота састоји се од транзистора који се покреће подешеним осцилаторним кругом који се састоји од завојнице. Када се детектује метал и електрична струја се поново преноси кроз завојницу, транзистор1 је у стању и доводи други транзистор2 у искључено стање. Овај транзистор3, заузврат, доводи други транзистор у стање искључености. Овај транзистор 3 је повезан са другим транзистор4 који је повезан тако да је у стању када је његов транзистор3 покретачког погона у искљученом стању. Транзистор 4 је повезан тако да у стању, зујалица и ЛЕД добијају одговарајућу пристрасност и започињу провођење.

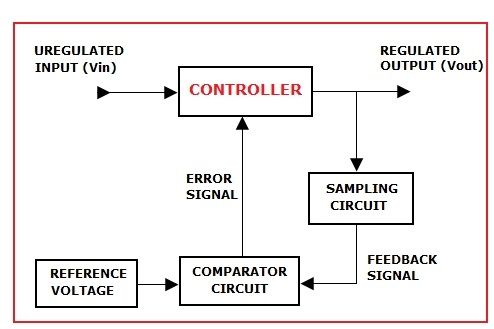
Блок дијаграм јединице детектора метала
ЛЕД почиње да светли и зујалица почиње да звони. Стога, када се открије метал, аларм зујалице ће почети да звони и ЛЕД ће засветлети.
Контрола робота:
Једноставним прототипом може се управљати помоћу РФ комуникације, која је систем кратког домета. Команде се преносе помоћу предајника, а прима их пријемник уграђен у круг робота за контролу кретања робота.

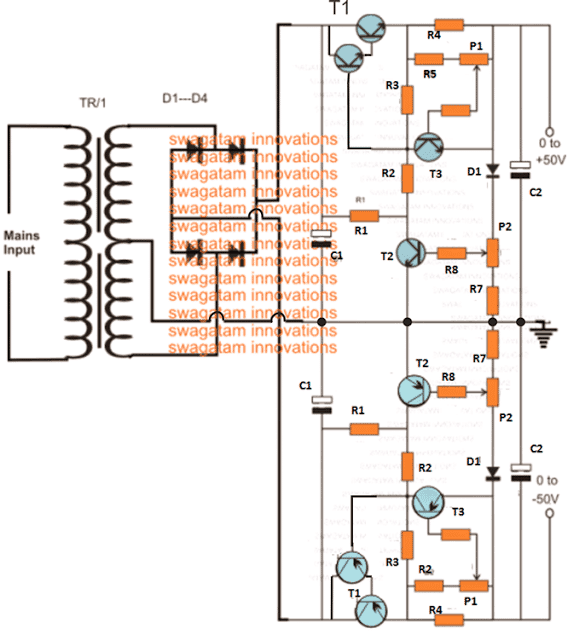
Блок дијаграм секције предајника
Предајник се састоји од скупа тастера попут напред, назад, заустављање, лево и десно који су притиснути да обезбеде кретање робота у било ком жељеном смеру. Тастери су повезани на улазни порт микроконтролера. Микроконтролер на пријему ових сигнала развија одговарајући 4-битни сигнал у паралелном облику преко другог И / О порта, на који је повезан ИЦ кодер. Давач претвара ове сигнале у серијски облик података. РФ предајник модулира ове серијске податке који се преносе кроз антену.

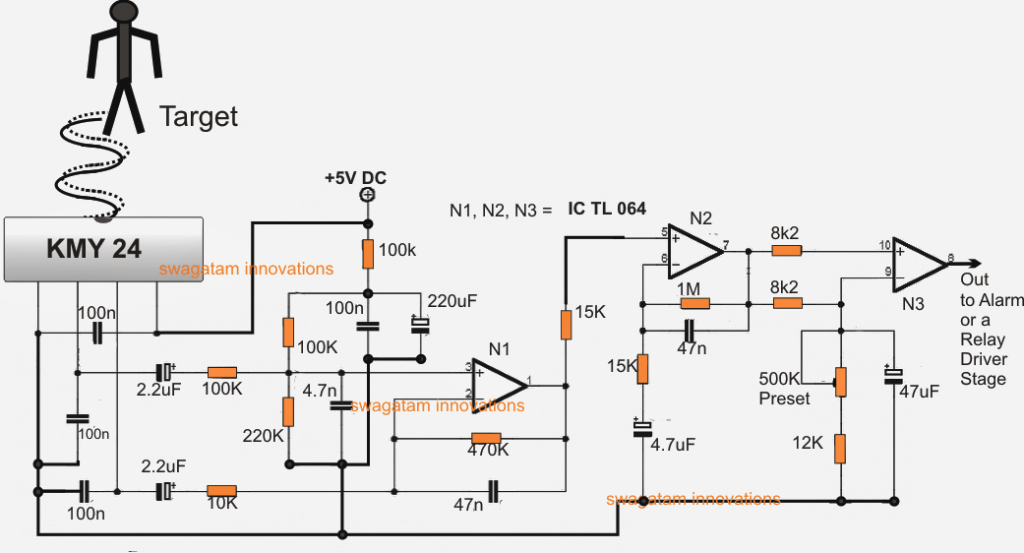
Блок дијаграм секције пријемника
Одељак пријемника постављен на роботу састоји се од РФ пријемника који демодулира овај сигнал. Декодер ИЦ прима овај сигнал у серијском облику и на свом излазу развија одговарајуће 4-битне паралелне податке. Микроконтролер прима ове податке и у складу с тим даје управљачки сигнал покретачу мотора ЛМ293Д, који покреће оба мотора.
Роботско возило за гашење пожара:
Концепт роботско возило за гашење пожара бори се у пожару. Последњих година догодило се неколико озбиљних несрећа, укључујући ватру и експлозије бомби. Знали смо за велике пожарне несреће као што су нуклеарне електране, нафта, резервоари за гас и хемијске фабрике, велике ватрогасне компаније на овим местима када су једном покренуле пожар, резултат може бити врло озбиљан. Хиљаде људи је умрло у овој инциденцији. То је гашење пожара роботско возило технологија. Ово роботско возило је некада проналазило ватру и борило се за ватру.

Роботско возило за гашење пожара
Принцип рада ватрогасног роботског возила:
Роботско возило натоварено цистерном за воду. Пумпом се управља бежичном комуникацијом (РФ и мобилна комуникација). Крај предајника повезан са тастерима. Коришћењем овог дугмета команде се шаљу примаоцу и управљају моментом робота попут напред, назад, лево, десно. Три прихватна крајња мотора повезана су са микроконтролером.

Блок дијаграм предајника

Блок дијаграм пријемника
РФ предајник делује као РФ даљински управљач у домету од 200 метара. У кући, канцеларијама и индустрији сензори пожара се чувају на одређеним местима када се ватра догоди у близини ватрогасног сензора. Сензори су осећај да се одговарајући бит преноси на РФ пријемник. РФ пријемник је интегрисан са микроконтролером. Када РФ пријемник прими сигнале да информације прелазе на микроконтролер, робот се креће према пожарним сензорима. Локације сензора се чувају у микроконтролеру. Једном када робот дође до жељеног места, робот се зауставља и активира прскалицу на ту ватру. Након испаљивања робот прелази у почетни положај. Читавим колом управља микроконтролер.
Врсте ватрогасних роботизованих возила:
Кућно роботско возило за гашење пожара :
Акција на терену ограничена је на тренутни Флоре оф хоусе. Овај робот користи многе предмете за домаћинство да би се запалио када неко спава или га нема. Овај робот се користи за заштиту дома, а помоћу ове апликације сва врата се отварају у Флоре-у јер се ово возило премешта са једног места на друго у кући. Противпожарно подручје мора бити сигурно како не би дошло до нове несреће. Додатна карактеристика овог робота је рад на великим удаљеностима.
Индустријско гашење пожара:
Већина индустрија суочена је са проблемима са пожарним несрећама попут плина, бензина, нуклеарних електрана, хемијске индустрије, огромне штете и већег броја људи мртвих у близини околних подручја. Овај робот има снагу да носи ватру унутар запаљеног подручја како би опскрбио неограниченом водом. Ватра узрокује смањену видљивост, екстремне врућине и још много ситуација које могу довести до повреда.
Гашење шумских пожара:
Шумски пожари су врло опасни. Може бити кратко време спаљивања велике количине шумске површине. Чак и градске ватрогасне службе морају да се суоче са шумским пожарима у околини града. Неколико година уназад око 152 ватрогасца убијено је током 1990-их. Роботика шумске ватре користи се за ватру и гашење пожара. Овај робот користи спољни управљачки уређај у сврхе бежичне комуникације. Модул је повезан са излазним крајем који се користи за гашење шумског пожара робота. Апликације као што су сензор притиска, сензор температуре, сензор смога, инфрацрвени сензор, користе се за управљање роботом за гашење шумских пожара.
На брзину!
Иако сам дао основну идеју о роботу са детектором метала, главно питање и даље постоји - Како водити робота на неравним теренима који су непознати, посебно у окружењима изложеним јаким кишама, прашини и врућим температурним опсезима. Да бисте пронашли одговор и поставили коментаре.