Серво мотори су самостални механички уређаји који се користе за управљање машинама са великом прецизношћу. Налазе се у многим применама, од играчака до индустријске аутоматизације. Постоје разне врсте мотора, али серво мотори су посебно дизајнирани за одређени угаони положај за управљање машинама. Обично се серво мотор користи за контролу угаоног кретања од 0 ° до 180 ° и 0 ° до 90 °. Тхе принцип рада серво мотора заснован на ПВМ ( модулација ширине импулса ) импулси.

Серво мотор
Интерфејс серво мотора са микроконтролером 8051
Серво мотор је један од најчешће коришћених мотора за прецизно кутно кретање. Предност употребе серво мотора је у томе што се угаоним положајем мотора може управљати без икаквог повратног механизма. Серво мотори се обично користе у комерцијалне и индустријске примене . Такође се широко користе као у погонским системима као што су роботи, авиони итд.

Повезивање серво мотора са микроконтролером 8051
Принцип рада и рада хоби серво мотора је врло једноставан, састојао се од три жице од којих су две (црна и црвена) служиле за напајање, а трећа за пружање управљачког сигнала. Таласи модулисани ширином импулса (ПВМ) користе се као управљачки сигнали, а угаона позиција је одређена ширином импулса на управљачком улазу. У овом чланку користимо серво мотор који има угао ротације од 0-180 °, а угаоним положајем може се управљати променом радних циклуса између 1мс до 2мс.
Овде је серво мотор повезан са 8051 микроконтролер , црна жица повезана са уземљењем и мотор и добијају напајање из црвене жице. Управљање прикључком серво мотора повезаним 0 микроконтролера 8051. Кристални осцилатор од 11,0592 МХз користи се за обезбеђивање импулсног сата на микроконтролеру и керамичке кондензаторе од 22 пф који се користе за стабилизацију рада кристала. Кондензатор од 10КΩ и 10уф користи се за напајање микроконтролера при ресетовању.
Управљање серво мотором са ротацијом под углом
Принцип рада серво мотора углавном зависи од радног циклуса. Као управљачке сигнале користи таласе модулисане ширином импулса (ПВМ). Угао ротације је одређен ширином импулса управљачког пина. Овде се серво мотор користи за угао ротације од 0 до 180 степени. Прецизним угловним положајем можемо контролисати променом импулса између 1мс и 2мс.

Управљање серво мотором са кутним ротацијама
Програмирање серво мотора са кутним ротацијама
#инцлуде
Сбит сервомотор_пин = П0 ^ 5
Кашњење празнине (непотписано инт)
Празно серво_делаи (непотписан инт)
Празно главно ()
{
Сервомотор_пин = 0к00
Урадити
{
// окретање на 0 °
Сервомотор_пин = 0к01
Сево_делаи (50)
Сервомотор_пин = 0к00
Кашњење (1000)
// окретање на 90 степени
Сервомотор_пин = 0к01
Сево_делаи (82)
Сервомотор_пин = 0к00
Кашњење (1000)
// окретање на 180 степени
Сервомотор_пин = 0к01
Сево_делаи (110)
Сервомотор_пин = 0к00
Кашњење (1000)
Док (1)
}
}
Кашњење празнине (непотписано инт а)
{
Непотписани инт п
За (п = 0п
}
Празно серво_делаи (непотписано инт а)
{
Непотписани инт п
За (п = 0п
}
Принцип рада серво мотора
Принцип рада серво мотора углавном зависи од „Флеминговог правила леве руке“. У основи су серво мотори прилагођени Једносмерни мотори , сензор положаја, редуктор брзине и електронски склоп. Једносмерни мотори се напајају из батерије и раде великом брзином и малим обртним моментом. Саставили смо осовину и зупчанике повезане на једносмерне моторе, а затим могли постепено повећавати и смањивати брзину мотора.
Сензор положаја препознаје положај вратила из његовог фиксног положаја и шаље информације у управљачки круг. Управљачки круг декодира сигнале у складу са сензором положаја и упоређује стварну локацију мотора са жељеним положајем и сходно томе контролише смер ротације једносмерног мотора да би се добио потребан положај. Генерално серво мотору је потребно напајање од 4,8 В до 6 В једносмерне струје.
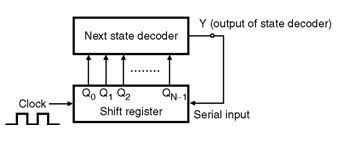
Управљање серво мотором помоћу команди серијског порта
Главна намера овог пројекта је управљање серво мотором помоћу личног рачунара. Потребна му је једна контролна линија од микроконтролера и серијска улазна линија, од серијског порта личног рачунара за слање команди у коло. Извор времена даје кристални осцилатор. Дизајнирано коло серво мотора повезано са рачунаром уз помоћ серијског кабла и мерача нивоа, а затим отворите софтвер „Хипер Терминал“ на рачунару како бисте изабрали могућност рачунара.

Управљање серво мотором помоћу команди серијског порта
Једном када се команде пошаљу са личног рачунара (рачунара) на микроконтролер преко хипер терминала помоћу пребацивача нивоа, микроконтролер прибавља ове податке и упоређује их са унапред дефинисаним подацима и генерише одговарајуће сигнале да активира управљачки програм мотора да га покрене на жељена брзина. Много пројекти микроконтролера развијен на основу серво мотора, као што су роботи за уравнотежење, хеликоптери за писту и тако даље. Серво мотор можемо користити у безбедносне сврхе повезивањем са бежичном камером, као што је могуће за контролу дигресије камере 360.
Самобалансирајући робот
Самобалансирајући робот је способан да се уравнотежи уз помоћ серво мотора. Овај робот је састављен користећи структурне, механичке и електронске компоненте које производе видљиво неуравнотежену платформу која је врло спремна за превртање у једном поравнању. Точкови робота су способни за самостално окретање на два начина, која се покрећу серво мотором. Подаци о углу уређаја у односу на земљу добиће се из сензори нагиба на уређају.

Самобалансирајући робот
Сензор нагиба може бити акцелерометар, жироскопски сензор или ИР сензор (за мерење удаљености до тла). Сензори шаљу информације управљачкој јединици, која ће обрађивати повратне информације користећи основни пропорционални, интегрални, изведени (ПИД) алгоритам да генерише компензационе контролне сигнале положаја серво моторима како би уравнотежила уређај.
Примене серво мотора
- Користи се у машинама за прешу за сечење комада по величини
- Користи се у пунионици шећера
- Користи се у апликацијама за означавање
- Користи се систем за паковање са случајном временском функцијом
- Користи се у авионима
Предности серво мотора
- Ако мотор добије велико оптерећење, возач ће појачати струју ка завојници мотора док покушава да ротира мотор. Углавном, не постоји стање ван корака.
- Серво моторима је омогућен рад велике брзине.
Овде се ради о принципу рада серво мотора и повезивање са 8051 микроконтролером .Даље, за било какву техничку помоћ у вези са овим чланком или електронски пројекти који су дизајнирани помоћу уређаја за повезивање као што су РТЦ, ОЛЕД, флеш меморија, прилагођени ЛЦД, екрани осетљиви на додир итд. Можете нам се обратити давањем својих коментара у одељку за коментаре у наставку.