Пост свеобухватно детаљно описује основни концепт рада једносмерних мотора без четкица који се називају и БЛДЦ мотори.
Разлика између четканог и четканог једносмерног мотора
У нашим традиционалним четканим моторима четке се користе за пребацивање централног покретног ротора у односу на околни статор са сталним магнетом.
Четке постају императив јер је ротор направљен од електромагнета којима је потребна снага за рад, али пошто такође треба да ротира ствари постају неспретне и четке постају једина алтернатива за напајање ротирајућег електромагнетног ротора.
Супротно томе, код четкастих једносмерних мотора или БЛДЦ мотора имамо четкицу са централним статором и окружујући кружни ротор. Статор се састоји од скупа електромагнета, док ротор има трајне магнете причвршћене преко свог обода на одређеним прорачунатим положајима.
Коришћење сензора ефеката Халл-а
Механизам такође има сензор Халовог ефекта који је инсталиран како би се могао осетити положај ротора и његових магнета у односу на електромагнет статора и обавестити податке у спољни комутациони круг који затим постаје одговоран за активирање / деактивирање електромагнета на тачан редослед или време, утичући на ротационо кретање на ротору.
Горње објашњење може се разумети уз помоћ следеће основне илустрације, а затим и кроз детаљни дизајн на следећим сликама.

Научили смо и знамо прилично занимљивих ствари о магнетима и начину на који ови уређаји комуницирају.
Знамо да северни пол магнета привлачи јужни пол другог магнета док се попут полова одбијају.
Како су постављени трајни магнети
На горе приказаном дијаграму видимо диск са уграђеним магнетом на ивици (приказан црвеном бојом) који је позициониран са северним полом окренутим ка споља, као и електромагнет постављен паралелно у близини кружне ивице диска који ствара јужно магнетно поље када је под напоном.
Под претпоставком да је распоред постављен како је приказано на првом горњем дијаграму са електромагнетом у деактивираном стању.
У овом положају чим се електромагнет активира са одговарајућим једносмерним улазом он постиже и генерише јужно магнетно поље утичући на вучну силу преко магнета диска што заузврат приморава диск да се окреће са одређеним обртним моментом док његов трајни магнет не дође у ред електромагнети насупрот линија флукса.
Горња радња приказује основни формат у којем функционише БЛДЦ концепт.
Како БЛДЦ мотор ради са сензорима Халл ефекта
Сада да видимо како се заправо примењује горњи концепт помоћу сензора Халл ефекта како би се одржало континуирано кретање преко ротора.
Следећи пример дијаграма свеобухватно објашњава механизам:

У горњем дијаграму у основи видимо једноставан БЛДЦ распоред ротора / статора, где је спољни кружни елемент ротирајући ротор, док централни електромагнет постаје фиксни статор.
Може се видети да ротор има неколико сталних магнета причвршћених на периферији који имају јужни пол као утицајне линије флукса, централни статор је снажни електромагнет који је дизајниран да генерише еквивалентну снагу магнетног флукса Северног пола када се напаја помоћу спољни једносмерни ток.
Такође можемо визуализовати Халл сензор смештен близу једног од углова унутрашње периферије ротора. Халов ефекат у основи осећа магнетно поље ротирајућег ротора и доводи сигнал у управљачки круг одговоран за напајање електромагнета статора.
Позивајући се на горњи положај, видимо празно подручје (без било каквог магнетног поља) ротора у блиском контакту са Халл сензором који га држи у искљученом стању.
У овом тренутку сигнал за искључивање из ефекта Халла обавештава управљачки круг да УКЉУЧИ електромагнете, што тренутно изазива вучни ефекат на јужни пол ротора који стоји одмах иза угла.
Када се то догоди, јужни пол се спушта, стварајући потребан обртни моменат на ротору и покушава да се поравна у линији са северним полом електромагнета.
Међутим, у процесу се јужни пол ротора такође приближава сензору Халл-а (као што је приказано на доњем дијаграму) који то одмах детектује и УКЉУЧУЈЕ информишући управљачки круг да ИСКЉУЧИ електромагнете.
ИСКЉУЧЕНО Време електромагнета је пресудно
Искључивање електромагнета у правом тренутку, како сигнализира сензор халског ефекта, забрањује заустављање и ометање кретања ротора, већ му омогућава да настави са кретањем кроз генерисани обртни моменат све док претходни положај не почне да се обликује и док хала сензор још једном „опипава“ празно подручје ротора и искључује се понављајући циклус.
Горње пребацивање Халл сензора у складу са различитим положајима ротора наноси континуирано ротационо кретање са током који може бити директно пропорционалан магнетној интеракцији статор / ротор, и наравно позиционирањем ефекта Халл-а.
Горње дискусије објашњавају најосновнија два магнетна механизма, један механизам Халовог сензора.
Да би се постигли изузетно већи обртни моменти, више магнета и комплета електромагнета се користи у другим моторима без четкица са већом ефикасношћу, при чему се може видети више од једног сензора ефекта Халл-а за спровођење вишеструког осетљивости роторских магнета тако да се различити скупови електромагнета могу пребацити на преферирани тачан редослед.
Како управљати БЛДЦ мотором
До сада смо разумели основни радни концепт БЛДЦ мотори и научили како се Халл-ов сензор користи за активирање електромагнета мотора кроз спољашње прикључено електронско коло за одржавање непрекидног ротационог кретања ротора, у следећем одељку проучићемо регадисање како заправо управљачко коло БЛДЦ ради за управљање БЛДЦ моторима
Метода примене електромагнета са фиксним статором и ротирајућег слободног магнетног ротора осигурава побољшану ефикасност БЛДЦ мотора у поређењу са традиционалним брушеним моторима који имају потпуно супротну топологију и због тога захтевају четке за рад мотора. Употреба четкица чини поступке релативно неефикасним у смислу дугог века трајања, потрошње и величине.
Недостатак БЛДЦ мотора
Иако су БЛДЦ типови можда најефикаснији концепт мотора, он има један значајан недостатак што му је за рад потребан спољни електронски склоп. Међутим, појавом модерних ИЦ-а и осетљивих Халл-ових сензора ово питање сада изгледа прилично тривијално у поређењу са високим степеном ефикасности који је повезан са овим концептом.
4-магнетни БЛДЦ управљачки програм Дизајн
У овом чланку расправљамо о једноставном и основном управљачком колу за четверомагнетни, БЛДЦ мотор типа типа Халл. Рад мотора може се разумети позивањем на следећи дијаграм механизма мотора:

Горња слика приказује основни БЛДЦ распоред мотора који има два сета сталних магнета преко периферије спољног ротора и два сета централног електромагнета (А, Б, Ц, Д) као статора.
Да би покренули и одржали обртни обртни моменат било А, Б или Ц, Д електромагнети морају бити у активираном стању (никада заједно) у зависности од положаја северног / јужног пола роторског магнета у односу на активирани електромагнети.
Како ради БЛДЦ моторни возач
Да будемо прецизни, претпоставимо положај приказан у горњем сценарију са А и Б у укљученом стању тако да се страна А напаја јужним полом, док се страна Б напаја северним полом.
То би значило да би страна А вршила вучни ефекат преко свог левог плавог северног пола и одбијајући ефекат на свом десном бочном јужном полу статора, слично би страна Б повлачила доњи црвени јужни пол и одбијала горњи северни пол ротора .... онда би се могло претпоставити да читав процес врши импресивно кретање у смеру казаљке на сату над механизмом ротора.
Претпоставимо такође да је у горе наведеној ситуацији Халл-ов сензор у деактивираном стању, јер може бити „Халл-активирани“ Халлов сензорски уређај.
Горњи ефекат би покушао да поравна и присили ротор тако да се југ закључа лицем у лице са страном Б, док се северни пол са страном А, међутим пре него што ова ситуација успе да постигне, Халл-ов сензор се доводи у непосредној близини померајући горњи јужни пол ротора, а када овај само пређе преко Халловог сензора, присиљен је да се укључи, шаљући позитиван сигнал на повезани управљачки круг који тренутно реагује и искључује електромагнете А / Б и укључује електромагнете Ц / Д, водећи рачуна да се момент ротора поново покреће у смеру казаљке на сату, одржавајући константан обртни момент на ротору.
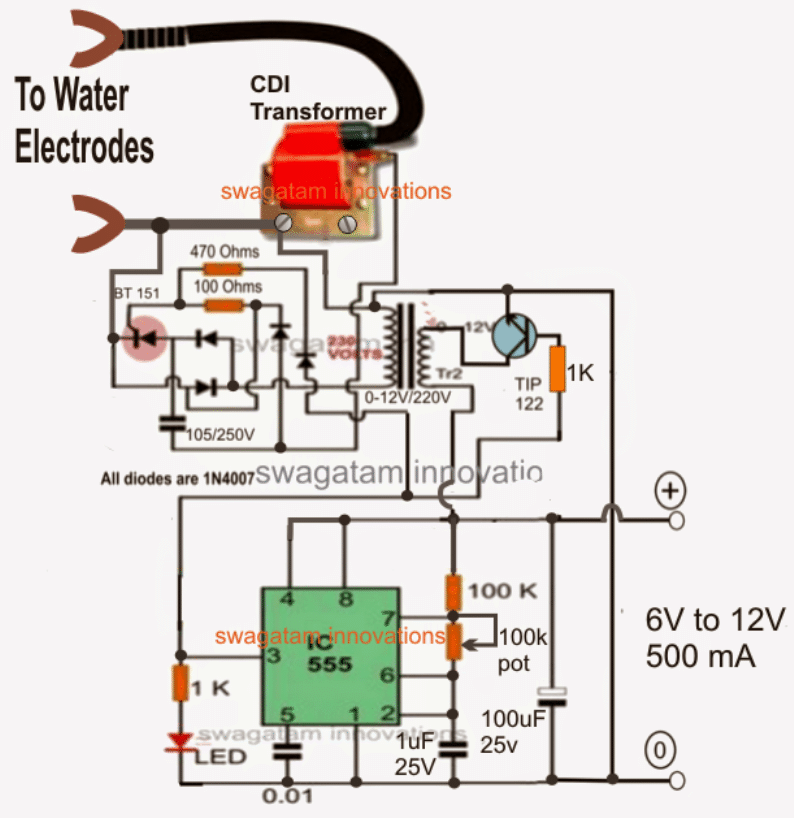
Основни БЛДЦ управљачки круг
Горе објашњено пребацивање електромагнета као одговор на окидачки сигнал Халловог сензора може се врло једноставно имплементирати користећи следећу директну идеју БЛДЦ управљачког круга.

Струјно коло не треба много објашњења, јер је његово сувише основно, током прекидача УКЉУЧЕНОСТИ Халл сензора, БЦ547 и спојени ТИП122 одговарајуће УКЉУЧЕНИ што заузврат УКЉУЧУЈЕ одговарајуће сетове електромагнета причвршћених преко колектора и позитивне , током периода ИСКЉУЧЕЊА Халловог сензора, БЦ547 / ТИП122 пар је ИСКЉУЧЕН, али крајњи леви ТИП122 транзистор је УКЉУЧЕН активирајући супротне скупове електромагнета.
Ситуација се мења наизменично, непрекидно све док остаје примењена снага одржавајући БЛДЦ ротирањем са потребним обртним моментима и моментом.
Претходно: Круг пуњача за лаптоп из 12В батерије Следеће: Како направити моћан круг ометача РФ сигнала

![Направи једноставно коло претварача долара [Степ Довн Цонвертер]](https://electronics.jf-parede.pt/img/3-phase-power/D0/build-a-simple-buck-converter-circuit-step-down-converter-1.jpg)
![Кругови пуњача за батерије од 12 В [помоћу ЛМ317, ЛМ338, Л200, транзистора]](https://electronics.jf-parede.pt/img/battery-chargers/11/12v-battery-charger-circuits-using-lm317.png)