
Као што и само име говори, овај чланак ће дати прецизну идеју о структури и раду ПИД контролера. Улазећи у детаље, хајде да вам представимо ПИД контролере. ПИД контролери се налазе у широком спектру примена за управљање индустријским процесима. Приближно 95% операција затворене петље индустријска аутоматизација сектор користе ПИД контролере. ПИД је скраћеница од Пропорционално-интегрални-изведени. Ова три контролера су комбинована на такав начин да производе контролни сигнал. Као контролер повратне спреге, он даје управљачки излаз на жељеним нивоима. Пре изума микропроцесора, ПИД контрола је примењена аналогним електронским компонентама. Али данас сви ПИД контролери обрађују микропроцесори. Програмабилни логички контролери такође имају уграђена упутства за ПИД контролер. Због флексибилности и поузданости ПИД контролера, они се традиционално користе у апликацијама за контролу процеса.
Шта је ПИД контролер?
Израз ПИД означава пропорционални интегрални дериват и то је једна врста уређаја који се користи за контролу различитих процесних променљивих као што су притисак, проток, температура и брзина у индустријској примени. У овом регулатору користи се уређај за повратну везу контролне петље за регулацију свих променљивих процеса.
Ова врста контроле користи се за погон система у правцу циљне локације која је иначе на нивоу. Готово је свуда за контролу температуре и користи се у научним процесима, аутоматизацији и безбројним хемикалијама. У овом контролеру, повратна спрега затворене петље се користи за одржавање стварног излаза из методе попут близине циљу, иначе излаза на тачки поправљања, ако је могуће. У овом чланку се говори о дизајну ПИД регулатора са начинима управљања који се користе у њима попут П, И & Д.
Историја
Историја ПИД контролера је, 1911. године, Елмер Сперри развио је први ПИД регулатор. Након тога, ТИЦ (Таилор Инструментал Цомпани) је имплементиран бивши пнеуматски контролер са потпуно прилагодљивим 1933. год. После неколико година, инжењери контроле уклонили су грешку стабилног стања која се налази у пропорционалним контролерима поновним подешавањем краја на неку лажну вредност све док грешка није била нула.
Ово поновно подешавање је укључивало грешку која је позната као пропорционални-интегрални контролер. Након тога, 1940. године, развијен је први пнеуматски ПИД контролер изведеном дејством како би се смањили проблеми са прекомерним снимањем.
1942. године, Зиеглер & Ницхолс су увели правила за подешавање како би открили и поставили одговарајуће параметре ПИД контролера од стране инжењера. Напокон, аутоматски ПИД контролери су се интензивно користили у индустрији средином 1950.
Блок дијаграм ПИД контролера
Затворени систем попут ПИД контролера укључује систем за контролу повратних информација. Овај систем процењује променљиву повратне спреге помоћу фиксне тачке да генерише сигнал грешке. На основу тога мења системски излаз. Овај поступак ће се наставити све док грешка не достигне нулу, иначе вредност променљиве повратне спреге постане еквивалентна фиксној тачки.
Овај контролер даје добре резултате у поређењу са ОН / ОФФ типком контролера. У управљачу типа ОН / ОФФ могу се постићи само два услова за управљање системом. Једном када је вредност процеса нижа од фиксне тачке, тада ће се УКЉУЧИТИ. Слично томе, ИСКЉУЧИТ ће се када је вриједност већа од фиксне вриједности. Излаз није стабилан код ове врсте контролера и често ће се њихати у пределу фиксне тачке. Међутим, овај контролер је стабилнији и тачнији у односу на контролер типа ОН / ОФФ.

Рад ПИД контролера
Рад ПИД контролера
Коришћењем јефтиног једноставног ОН-ОФФ контролера могућа су само два стања управљања, попут потпуно УКЉУЧЕНО или потпуно ИСКЉУЧЕНО. Користи се за ограничену контролну апликацију где су ова два контролна стања довољна за контролни циљ. Међутим, осцилирајућа природа ове контроле ограничава њену употребу и стога је замењује ПИД контролери.
ПИД регулатор одржава излаз тако да постоји нулта грешка између променљиве процеса и задате вредности / жељеног излаза операцијама затворене петље. ПИД користи три основна контролна понашања која су објашњена у наставку.
П- контролер
Пропорционални или П-регулатор даје излаз који је пропорционалан тренутној грешци е (т). Поређује жељену или задату тачку са стварном вредношћу или вредношћу процеса повратне информације. Добијена грешка се множи пропорционалном константом да би се добио излаз. Ако је вредност грешке нула, тада је излаз овог регулатора нула.

П-контролер
Овај контролер захтева пристрасност или ручно ресетовање када се користи сам. То је зато што никада не достиже стабилно стање. Омогућава стабилан рад, али увек одржава грешку у стабилном стању. Брзина одзива се повећава када се повећа пропорционална константа Кц.

Одговор П-контролера
И-Цонтроллер
Због ограничења п-регулатора, где увек постоји помак између променљиве процеса и задате вредности, потребан је И-контролер, који пружа неопходне мере за уклањање грешке у стабилном стању. Интегрише грешку током одређеног временског периода док вредност грешке не достигне нулу. Држи вредност на коначном контролном уређају при којем грешка постаје нула.

ПИ контролер
Интегрална контрола смањује свој излаз када се догоди негативна грешка. Ограничава брзину одговора и утиче на стабилност система. Брзина одзива повећава се смањењем интегралног појачања, Ки.

Одговор ПИ контролера
На горњој слици, како се појачање И-контролера смањује, грешка у стационарном стању такође се смањује. У већини случајева, ПИ контролер се користи нарочито тамо где није потребан одзив велике брзине.
Док се користи ПИ контролер, излаз И-контролера је ограничен на донекле опсег да би се превазишао интегрални намотај услови у којима се интегрални излаз повећава чак и при нултом стању грешке, услед нелинеарности у постројењу.
Д-контролер
И-контролер нема могућност предвиђања будућег понашања грешке. Дакле, нормално реагује када се промени задата вредност. Д-контролер превазилази овај проблем предвиђањем будућег понашања грешке. Његов излаз зависи од стопе промене грешке у односу на време, помножене са дериватном константом. То даје почетни старт излазу, повећавајући тиме одзив система.

ПИД контролер
На горњој слици Д одговора, контролер је већи у поређењу са ПИ контролером, а такође се смањује и време смиривања излаза. Побољшава стабилност система компензацијом фазног заостајања изазваног И-контролером. Повећавање добитка деривата повећава брзину одзива.

Одговор ПИД контролера
Тако смо коначно приметили да комбиновањем ова три контролера можемо добити жељени одговор система. Различити произвођачи дизајнирају различите ПИД алгоритме.
Врсте ПИД контролера
ПИД контролери су класификовани у три типа, попут ОН / ОФФ, пропорционалних и стандардних регулатора. Ови контролери се користе на основу система управљања, а корисник може да користи контролер за регулисање методе.
ОН / ОФФ контрола
Метода управљања укључивањем и искључивањем је најједноставнији тип уређаја који се користи за контролу температуре. Излаз уређаја може бити УКЉУЧЕН / ИСКЉУЧЕН без централног стања. Овај регулатор ће укључити излаз само када температура пређе фиксну тачку. Гранични контролер је једна посебна врста ОН / ОФФ контролера који користи релеј за закључавање. Овај релеј се ресетује ручно и користи се за искључивање методе када се достигне одређена температура.
Пропорционална контрола
Ова врста контролера дизајнирана је за уклањање цикличког повезивања повезаног преко ОН / ОФФ контроле. Овај ПИД регулатор ће смањити нормалну снагу која се напаја према грејачу када температура достигне фиксну тачку.
Овај регулатор има једну функцију за управљање грејачем тако да неће премашити фиксну тачку, али ће достићи фиксну тачку да одржи стабилну температуру.
Овај чин пропорционисања може се постићи УКЉУЧИВАЊЕМ / ИСКЉУЧИВАЊЕМ излаза за мале временске периоде. Ово пропорционисање времена промениће однос између времена УКЉУЧЕЊА и времена ИСКЉУЧЕЊА за контролу температуре.
ПИД контролер стандардног типа
Ова врста ПИД контролера спојиће пропорционалну контролу кроз интегрисану и изведену контролу како би аутоматски помогла јединици да надокнади модификације унутар система. Ове модификације, интегралне и изведене изражене су у временски заснованим јединицама.
Ови контролери се такође упућују кроз њихове реципрочне вредности, РАТЕ & РЕСЕТ (Однос и ресетовање). Услови ПИД-а морају се посебно прилагодити, у супротном прилагодити одређеном систему уз суђење, као и грешку. Ови контролери ће понудити најпрецизнију и најстабилнију контролу од 3 типа контролера.
ПИД контролери у реалном времену
Тренутно постоје разне врсте ПИД контролера доступних на тржишту. Ови контролери се користе за индустријске захтеве управљања попут притиска, температуре, нивоа и протока. Једном када се ови параметри контролишу преко ПИД-а, избори укључују употребу засебног ПИД контролера или било ког ПЛЦ-а.
Ови одвојени контролери се користе свуда где је у супротном потребно проверити две петље, као и контролисати их у супротном, у условима где год је то сложено са правом уласка кроз веће системе.
Ови управљачки уређаји пружају различите могућности за соло и двоструку петљу управљања. Самостални ПИД контролери пружају неколико конфигурација са фиксном тачком за производњу неколико аутономних аларма.
Ови самостални контролери углавном се састоје од ПИД регулатора компаније Хонеивелл, температурних регулатора компаније Иокогава, аутотуне регулатора компаније ОМЕГА, Сиеменс и АББ.
ПЛЦ-ови се користе као ПИД контролери у већини апликација за индустријску контролу. Распоред ПИД блокова може се извршити унутар ПАЦ-а или ПЛЦ-а како би се пружили супериорни избори за тачну ПЛЦ контролу. Ови контролери су паметнији и моћнији у поређењу са одвојеним контролерима. Сваки ПЛЦ укључује ПИД блок у оквиру софтверског програмирања.
Методе подешавања
Пре него што се започне рад ПИД контролера, он мора бити подешен тако да одговара динамици процеса који треба контролисати. Дизајнери дају подразумеване вредности за изразе П, И и Д, а те вредности нису могле да дају жељене перформансе и понекад доводе до нестабилности и спорих контролних перформанси. Различите врсте метода подешавања су развијене за подешавање ПИД контролера и захтевају велику пажњу оператера да би изабрао најбоље вредности пропорционалних, интегралних и изведених добитака. Неке од њих су дате у наставку.
ПИД контролери се користе у већини индустријских апликација, али треба знати поставке овог регулатора да бисте га правилно подесили како би генерисали жељени излаз. Овде подешавање није ништа друго до поступак примања идеалног одговора од контролера кроз подешавање најбољих пропорционалних добитака, интегралних и изведених фактора.
Жељени излаз ПИД регулатора може се добити подешавањем контролера. Доступне су различите технике за добијање потребних резултата из контролера, попут покушаја и грешака, Зеиглер-Ницхолс-а и кривуље реакције процеса. Најчешће коришћене методе су покушај и грешка, Зеиглер-Ницхолс итд.
Метод пробе и грешке: То је једноставна метода подешавања ПИД регулатора. Док систем или контролер ради, можемо подесити контролер. У овој методи прво морамо да поставимо вредности Ки и Кд на нулу и повећавамо пропорционални члан (Кп) док систем не постигне осцилирајуће понашање. Једном када осцилира, подесите Ки (интегрални појам) тако да осцилације престану и на крају подесите Д да бисте добили брзи одзив.
Техника криве реакционог процеса: То је техника подешавања са отвореном петљом. Производи одговор када се на систем примењује корак уноса. У почетку морамо ручно да применимо неки управљачки излаз на систем и морамо да снимимо криву одзива.
После тога треба израчунати нагиб, мртво време, време пораста криве и на крају заменити ове вредности у П, И и Д једначинама да бисмо добили вредности добитка ПИД чланова.

Крива реакције процеса
Зеиглер-Ницхолсова метода: Зеиглер-Ницхолс је предложио методе затворене петље за подешавање ПИД контролера. То су метода континуираног бициклирања и метода пригушених осцилација. Поступци за обе методе су исти, али понашање осцилација је различито. У овом, прво, морамо да поставимо константу п-регулатора, Кп на одређену вредност, док су вредности Ки и Кд нула. Пропорционални добитак се повећава све док систем осцилира константном амплитудом.
Добитак при којем систем производи константне осцилације назива се крајњи добитак (Ку), а период осцилација назива се крајњи период (Пц). Једном када се постигне, можемо унети вредности П, И и Д у ПИД регулатор по Зеиглер-Ницхолс-овој табели, што зависи од регулатора који се користи као П, ПИ или ПИД, као што је приказано доле.

Зеиглер-Ницхолсов сто
Структура ПИД контролера
ПИД контролер се састоји од три појма, и то пропорционалне, интегралне и изведене контроле. Комбиновани рад ова три контролера даје стратегију управљања за контролу процеса. ПИД контролер манипулише процесним променљивим попут притиска, брзине, температуре, протока итд. Неке од апликација користе ПИД контролере у каскадним мрежама где се два или више ПИД-а користе за постизање контроле.

Структура ПИД контролера
Горња слика приказује структуру ПИД контролера. Састоји се од ПИД блока који даје свој излаз процесном блоку. Процес / постројење се састоји од завршних управљачких уређаја попут актуатора, управљачких вентила и других управљачких уређаја за управљање различитим процесима индустрије / постројења.
Сигнал повратне спреге из процесног постројења упоређује се са задатом тачком или референтним сигналом у (т) и одговарајући сигнал грешке е (т) доводи се у ПИД алгоритам. Према пропорционалним, интегралним и изведеним управљачким прорачунима у алгоритму, регулатор даје комбиновани одзив или контролисани излаз који се примењује на уређаје за управљање постројењем.
Свим управљачким апликацијама нису потребна сва три управљачка елемента. Комбинације попут ПИ и ПД контрола се врло често користе у практичним применама.
Апликације
Примене ПИД контролера укључују следеће.
Најбоља примена ПИД регулатора је контрола температуре где регулатор користи улаз сензора температуре и његов излаз се може повезати са управљачким елементом попут вентилатора или грејача. Генерално, овај регулатор је једноставно један од елемената система за контролу температуре. Читав систем мора да се испита и размотри приликом одабира правог контролера.
Контрола температуре пећи
Генерално, пећи се користе за грејање и садрже огромну количину сировине на огромним температурама. Уобичајено је да заузети материјал укључује огромну масу. Због тога је потребна велика количина инерције, а температура материјала се не мења брзо чак и када се примењује велика топлота. Ова карактеристика резултира умерено стабилним ПВ сигналом и омогућава периоду деривата да ефикасно исправи грешку без екстремних промена било ФЦЕ или ЦО.
МППТ контролер пуњења
В-И карактеристика фотонапонске ћелије углавном зависи од опсега температуре као и од зрачења. На основу временских услова, струја и радни напон ће се стално мењати. Дакле, изузетно је значајно пратити највиши ПоверПоинт ефикасног фотонапонског система. ПИД контролер се користи за проналажење МППТ давањем ПИД регулатора тачака фиксног напона и струје. Једном када се промени временско стање, трагач одржава стабилност струје и напона.
Претварач енергетске електронике
Знамо да је претварач апликација енергетске електронике, па се ПИД контролер углавном користи у претварачима. Кад год се претварач повеже кроз систем заснован на промени унутар оптерећења, тада ће се променити излаз претварача. На пример, претварач је повезан са оптерећењем које се напаја огромном струјом када се оптерећења повећају. Дакле, параметар напона као и струја није стабилан, али ће се променити на основу захтева.
У овом стању, овај контролер ће генерирати ПВМ сигнале за активирање ИГБТ претварача. На основу промене унутар оптерећења, сигнал одзива се даје ПИД регулатору тако да ће произвести н грешке. Ови сигнали се генеришу на основу сигнала квара. У овом стању можемо добити променљиви улаз и излаз путем сличног претварача.
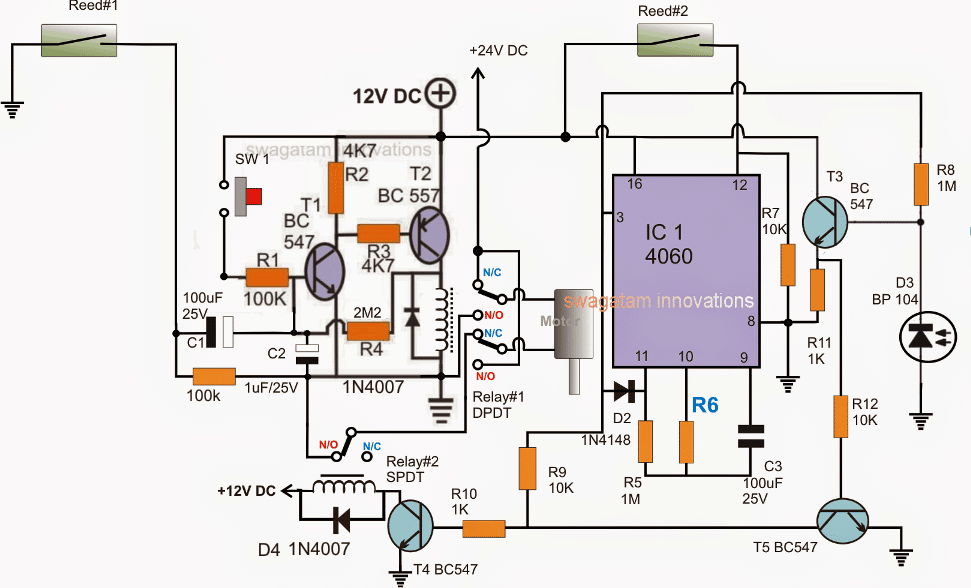
Примена ПИД контролера: Затворена контрола петље за једносмерни мотор без четкица
Интерфејс ПИД контролера
Дизајн и повезивање ПИД контролера могу се извршити помоћу Ардуино микроконтролера. У лабораторији је ПИД контролер заснован на Ардуину дизајниран користећи Ардуино УНО плочу, електронске компоненте, термоелектрични хладњак, док су програмски језици за програмирање који се користе у овом систему Ц или Ц ++. Овај систем се користи за контролу температуре у лабораторији.
Параметри ПИД-а за одређени регулатор налазе се физички. Функција различитих ПИД параметара може се имплементирати кроз накнадни контраст између различитих облика контролера.
Овај систем повезивања може ефикасно израчунати температуру кроз грешку од ± 0,6 ℃, док се константна температура регулише кроз само малу разлику од жељене вредности. Концепти који се користе у овом систему пружиће јефтине, као и тачне технике за управљање физичким параметрима у жељеном опсегу у лабораторији.
Стога овај чланак говори о прегледу ПИД контролера који укључује историју, блок дијаграм, структуру, типове, рад, методе подешавања, повезивање, предности и апликације. Надамо се да смо успели да пружимо основно, а прецизно знање о ПИД контролерима. Ево једноставног питања за све вас. Међу различитим методама подешавања, која метода се пожељно користи за постизање оптималног рада ПИД регулатора и зашто?
Молимо вас да своје одговоре дате љубазно у одељку за коментаре испод.
Пхото Цредитс
Блок дијаграм ПИД регулатора од викимедиа
Структура ПИД контролера, П-контролер, П - одзив регулатора и ПИД контролер од блог.оптицонтролс
П - одговор контролера од цонтрол.енгин.умицх
Одговор ПИ-контролера од м. јести
Одговор ПИД контролера од викимедиа
Зеиглер-Ницхолс-ов сто контроле.енгин






{kind=link}
{kind=link}
{kind=link}
{kind=link}