У овом посту истражујемо шта је БЛДЦ мотор, а затим сазнајемо у вези са дизајном склопа покретачког склопа БЛДЦ мотора без сензора.
БЛДЦ вентилатори за ЦПУ
Јесте ли видели оне брзе вентилаторе у процесорима, стабилизаторима напона, ДВД уређајима и другој сличној опреми, који раде с највећом ефикасношћу, трошећи најмање простора, струје, а опет способни да изведу важне операције предвиђене за одређену опрему?
Да, то су све модерне верзије БЛДЦ вентилатора или једносмерних мотора без четкица који су много супериорнији од старих традиционалних четканих мотора.

Љубазност слике: хттпс://ен.википедиа.орг/вики/Цомпутер_фан#/медиа/Филе:Гех%Ц3%А4усел%Ц3%БЦфтер.јпг
Међутим, за БЛДЦ мотор потребан је софистицирани управљачки круг, и да, сви ови ЦПУ вентилатори садрже уграђене управљачке модуле, иако се чини да се њима лако може управљати помоћу обичног једносмерне струје, систем је већ интерно опремљен паметним кругом.
БЛДЦ моторни возач
Овде ћемо сазнати о једном таквом паметном кругу драјвера БЛДЦ мотора, користећи један чип ДРВ10963 за управљање било којим малим БЛДЦ мотором са невероватном ефикасношћу, а касније ћемо у једном од предстојећих чланака видети како се овај склоп ИЦ може надоградити за вожњу чак снажни високонапонски БЛДЦ-ови попут оних који јесу користи се у квадкоптерима.
Али пре овога било би занимљиво сазнати мало о БЛДЦ моторима.
Разлика између четканог и четканог једносмерног мотора
Разлика између четканог мотора и мотора без четкица и степена ефикасности је прилично очигледна.
Будући да четкани мотори имају намотану арматуру која се креће између магнета, мора да користи „четке“ (контакте за трљање), тако да покрети стезаљки намотаја могу константно да примају напон напајања, а да сами не дођу до извора напајања, који би иначе радећи немогуће и угрожавају операције.
Код мотора без четкица, намотај или намотај се никада не помера и константан је, овде ротор носи скуп сталних магнета и ротира се под утицајем магнетних флукса околног намотаја.
Будући да је магнет без икаквих гњаважа и да може да ради без укључивања терминала за управљање или за примање напајања, може се кретати без напора, окрећући се великом брзином и готово без буке.
Али овде постоји квака. Да би електромагнет могао да реагује на флуксове трајног магнета, мора постојати стални помак магнетне фазе или полова, тако да су два колега у стању да непрестано реагују и пролазе кроз супротну силу, ослобађајући тако потребну торзијску силу преко ротора и извршите ротацију са резултујућим обртним моментом.
У четканом мотору ово постаје лакше због самоподесиве природе завојнице арматуре која се може ротирати и створити самоодрживу супротстављену магнетну силу и одржавати ротацију без потребе за било каквим спољним импулсима или обрадом.
Међутим, у БЛДЦ-у ово постаје проблем, јер магнетни ротор остаје „неупућен“ и захтева израчунату магнетну команду од намотаја да би се ротирао на смислен начин, а не на случајан начин.
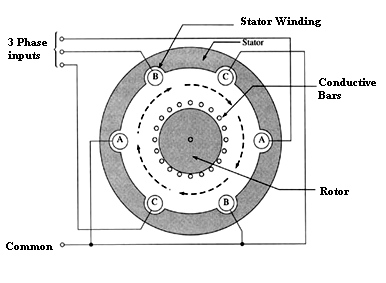
Управо због тога сви БЛДЦ мотори обавезно захтевају коло погонског склопа мотора за управљање три различита сета намотаја унутар мотора.
Према томе, сви БЛДЦ су у основи трофазни мотори и обавезно захтевају 3 фазе за стварање обртног момента на ротору.
Шта раде БЛДЦ управљачки програми без сензора
Круг управљачког склопа без сензора БЛДЦ једноставно електрификује 3 сета намотаја узастопним начином тако да магнетни ротор може проћи кроз доследну супротстављену силу омогућавајући мотору да постигне одрживи обртни моменат и ротациону силу.
Али ово секвенцијално напајање намотаја БЛДЦ кругом не може се само насумично подесити, већ мора бити у тандему или као одговор на ротациони положај магнета ротора, у супротном би примена могла да пропадне и могли бисмо бити сведоци осовине мотора (ротора ) ротира се случајно, то је трзање између казаљке на сату и супротно од казаљке на сату без разумног окретања.
Зашто се сензори користе у БЛДЦ моторима
Стога уводимо сензоре смештене у многим варијантама БЛДЦ мотора, ови сензори (типично сензори Халловог ефекта) „разумеју“ променљив положај магнетних полова роторског магнета, упућују прикључено коло процесора да електрификује одговарајући намотај и изврши ротационо кретање са оптималним обртним моментом.
Халов сензори ефекта ефикасно се користе у већини БЛДЦ мотора који су релативно већих димензија, али за мање моторе као што су ЦПУ вентилатори, ЦПУ погони, ДВД уређаји, мали издувни вентилатори, за моторе који се користе у куадцоптерима, сензори Халл ефекта могу постати неприкладни и стога је примењен алтернативни приступ без сензора.
То укључује експлоатацију својственог задњем ЕМФ електрицитета намотаја који се узима као референтни извор за обраду и електрификацију релевантних сетова намотаја и извршавање обртног момента.

Симулација кретања БЛДЦ ротора
У горњој сировој симулацији можемо да визуализујемо како се ослобођени ЕМФ узима као референца и користи за производњу импулса за секвенцирање за наредне сетове намотавања, намећући обртни обртни момент на централни ротор трајног магнета. Симулација можда није тачна репликација, али ипак даје грубу идеју о принципу рада.
Занимљиво је приметити да се импулс пребацује када је Н / С магнета тачно у центру језгра намотаја, што омогућава намотају да се или енергизира као Н или С у зависности од поларитета импулса и производи привлачење и одбијање сила на Н / С магнете, стварајући тако потребан обртни момент на максимално могућем нивоу.
А ово заузврат постаје могуће захваљујући задњем ЕМФ-у који се ослобађа пребацивањем претходног намотаја.
Горња дискусија појашњава рад сензора без БЛДЦ мотора, сада научимо како наведени круг рукује горњим сложеним извршавањем трофазног пребацивања
БЛДЦ управљачки програм ДРВ10963
После неког гуглања, пронашао сам ово коло без сензора БЛДЦ управљачког програма помоћу једног чипа ДРВ10963 који користи занемарљиву количину делова у конфигурацији, а опет је у стању да примени софистицирану обраду за предвиђене радње.
ДРВ10963 је најсавременији чип који је посебно дизајниран за рад БЛДЦ мотора без сензора, само предвиђањем задњег ЕМФ-а од намотаја мотора и пружањем прецизне команде над намотајем и постизањем оптималног обртног момента над ротором.
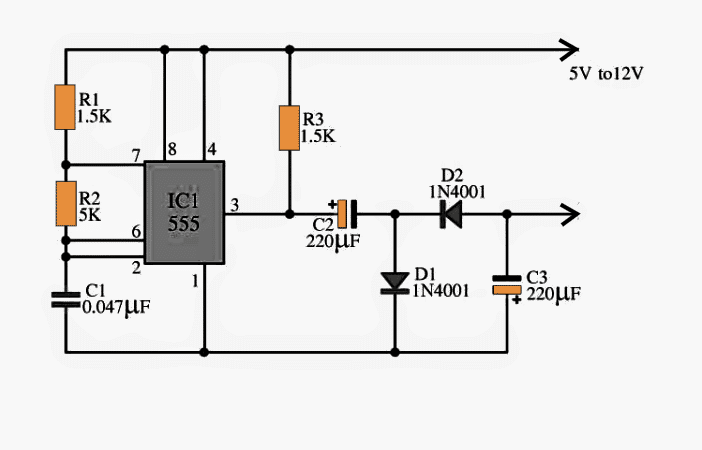
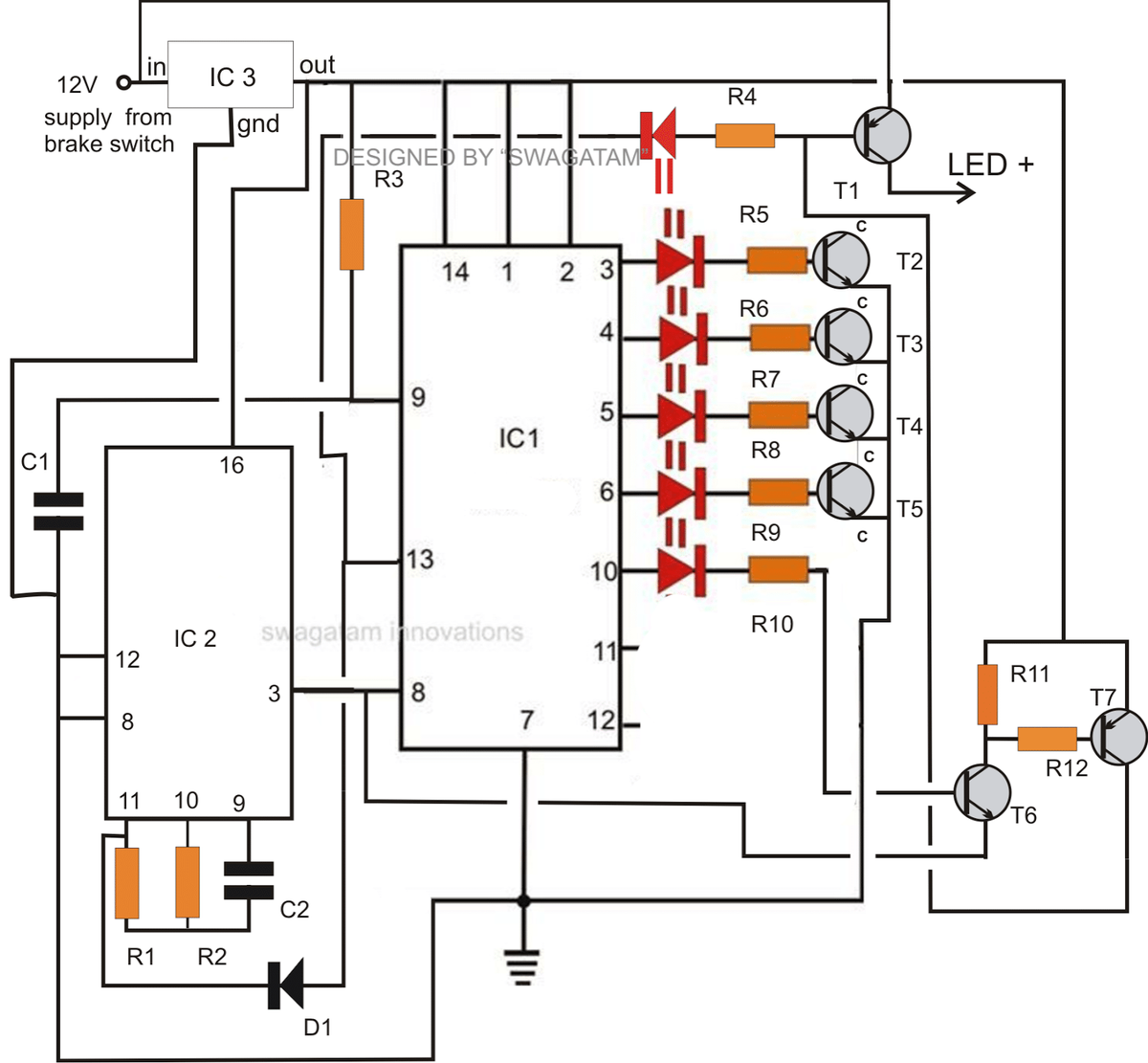
Кружни дијаграм

Горња слика приказује једноставан распоред кола који очигледно не укључује ништа осим саме ИЦ.
Различити изводи се додељују за извршавање одређених функција, као што је ПВМ контрола брзине мотора, контрола смера, итд. Једноставним напајањем одговарајућих извода одређеним подацима из спољног извора.
Следећа слика приказује пакет чипа, који изгледа као 10-пински ДИЛ ИЦ, разне функције пиноут-а истог могу се проучити из података како је дато на дијаграму:

Позивајући се на шему кола предложеног круга драјвера БЛДЦ без сензора као што је представљено у претходном чланку, као и горња слика чипа, детаљи пиноута могу се разумети на следећи начин:
Детаљи ИЦ пиноута
ФГ = То је иглица (излаз) индикатора брзине мотора, која је постављена у режиму отвореног колектора са унутрашњим БЈТ.
Отворени колектор означава да ће излаз на овом пиноуту произвести негативне ПВМ-ове кроз тонуће логике преко отвореног колектора и земље, тако да ће корисник добити потребно валидно очитање да преко овог отвореног колектора повеже повлачни отпор и позитивно напајање (5В ) за постизање индикације брзине на овом пиноуту.
ФГС = То је улаз селектора индикатора брзине, што значи да се овде може увести логика висока или ниска за УКЉУЧИВАЊЕ / ИСКЉУЧАВАЊЕ пин ФГ.
Вцц = Позитивно напајање ИЦ-а ради омогућавања рада, не сме прећи 5В.
В, У и В су трофазни излази за БЛДЦ мотор који треба да се управља преко ове ИЦ. Ово такође делује као улази за детекцију ЕМП импулса мотора за потребно синхронизовано пребацивање завојница мотора.
ГНД = Односи се на негативни пиноут ИЦ-а у односу на Вдд пин.
ФР = Помаже у одабиру или командовању смером мотора и може се динамички променити било када када се систем укључи, једноставно увођењем спољне логике високе или логике ниске.
ПВМ = Означава ПВМ контролни улаз из спољни ПВМ таласни генератор.
Овај ПВМ улаз може бити променљив за спровођење жељене контроле брзине повезаног БЛДЦ мотора.
Тачкасти размак у средини чипа означава термалну подлогу која се може стегнути или притиснути хладњаком како би се потопило могуће стварање топлоте на чипу док се користи са оптерећеним БЛДЦ мотором.
Горња дискусија наводи пиноут или детаље о вези чипа драјвера мотора БЛДЦ без сензора ДРВ10963, сада ћемо детаљно анализирати унутрашњу конфигурацију и функционисање чипа уз помоћ следећих тачака:
Опис уређаја
ДРВ10963 је трофазни електромотор без сензора са уграђеним МОСФЕТ-овима снаге (3-фазни Х-премоштени). Прилагођен је за већу продуктивност, смањену буку и минималне функције моторног погона са бројем секундарних материјала. Ексклузивна синусна шема управљања без прозора без сензора за 180 ° пружа ефикасност вожње без путовања мотором.
ДРВ10963 састављен од функције паметне детекције браве, заједно са додатним уграђеним сигурносним круговима за постизање сигурних перформанси. ДРВ10963 се може наћи у термички ефикасном 10-пинском УСОН паковању са непокривеном термалном простирком.
Како ИЦ функционише
Производ ДРВ10963 је трофазни мотор без сензора са МОСФЕТ-овима са уливеном снагом
створена специјално за врхунске перформансе, смањену резонанцу и минималне функције површинског броја моторних погона.
Главни план синусоидне регулације без прозора без прозора од 180 ° представља бешумно функционисање мотора одржавањем електрично стимулисаног таласа момента. Након иницијализације, уређај ДРВ10963 ће окренути мотор у току наведеном кроз ФР улазни клин.
Чип ДРВ10963 ће функционисати трофазни БЛДЦ мотор користећи синусни план управљања.
Значај употребљених напона синусоидне фазе зависи од радног циклуса ПВМ пина. Док се мотор креће, ДРВ10963 ИЦ испоручује податке о брзини на ФГ пину.
Јединица ДРВ10963 састоји се од могућности паметног закључавања. У случају да је мотор заустављен од страног притиска, програм ће идентификовати проблем закључавања и предузеће мере да се самостално заштити заједно са мотором.
Одређени поступак склопа за закључавање детаљно је приказан у Детекцији закључавања. Поред тога, ДРВ10963 ИЦ укључује више уграђених сигурносних кругова, на пример преко струјне заштите, пренапонске заштите, поднапонске заштите и заштите од температуре.
Карактеристично објашњење
Улаз и контрола брзине
ДРВ10963 представља трофазне ПВМ излазе од 25 кл-лз који могу имати стандардни проценат синусоидних таласних облика из фазе у фазу. У случају да се било који циклус одреди у односу на земљу, детектовани таласни облик ће вероватно бити синусоид заштићен ПВМ-ом у комбинацији са хармоникама трећег реда, као што је приказано на слици 2.

Ова стратегија кодирања поједностављује спецификације драјвера из разлога што ће вероватно бити често једнофазни излаз који би могао бити раван нули.
Амплитуда исхода варира у зависности од напона напајања (ВЦЦ) и предвиђеног радног циклуса ПВМ (ПВМ) како је дефинисано у једначини 1 и истакнуто на слици 3. Оптимална амплитуда се примењује када инструктовани радни циклус ПВМ износи 100 ПОСТ.
Впхпк = ПВМдц>

Брзина мотора се не регулише директно употребом ПВМ-а ради регулације амплитуде фазних напона који се користе за мотор.
Радни циклус ПВМ улаза је модификован у 9-битну дигиталну величину (од 0 до 511).
Резолуција прописа је 1/512 == 0,2%. Анализатор радног циклуса омогућава почетну операцију размене налога између улазног радног циклуса и 9-битне дигиталне фигуре.
Ово је истакнуто на слици 4, на којој је р = 80 мс.

Перформансе размене између ПВМ-овог радног циклуса заједно са излазном максималном амплитудом су променљиве у уређају ДРВ10963.
О максималној амплитуди исхода говори једначина 1 када је ПВМ наредба> радни циклус минималног функционисања. Најнижи радни циклус рада често се успоставља на 13%, 10%, 5% или без ограничења подешавањем ОТП (МИНОП_ДЦ1: 0).
Табела 1 приказује препоручене конфигурације за минимални радни циклус рада.
Кад год је ПВМ радни радни циклус мањи од најнижег радног циклуса и већи од 1,5%, излаз ће бити регулисан на минималном радном радном циклусу. Сваки пут када је улазни радни циклус испод 1,5%, уређај ДРВ10963 вероватно неће покретати излаз и биће послат у стање приправности.
Ово се може илустровати на слици 6.

Ротационе конфигурације
ДРВ10963 ће покренути мотор техником која је детаљно описана на слици 7.

Графикон иницијализације мотора састоји се од алтернатива које је могуће конфигурисати помоћу уређаја за ограничење преласка у отворену петљу (ХОВ.), Време поравнања (ТАХКХ) и брзину убрзања (РАЦЕ).
Да би ротор ускладио са комутацијском логиком, ДРВ10963 извршава к% радног циклуса на фазама В и В истовремено контролишући фазу У на ГНД.
Овај сценарио траје ТАИигн секунди. Значај к% идентификује се помоћу напона ВЦЦ (као што је приказано у табели 2) како би се задржао обртни обртни моменат током различитих различитих напона напајања.
Како се завршава поравнање, мотор је присиљен да убрза стављањем напона синусоидне фазе са вршним нивоима као што је приказано у Табели 2 и појачавањем помоћу опсега комутације брзином ширења представљеном РАЦЕ док ниво комутације не нарасте на Хом ., Хз.
Чим се достигне ово ограничење, ДРВ‘л0963 се претвара у режим затворене петље, при чему уграђени алгоритам управљања препознаје напредовање комутационог погона, док се запослени напон идентификује на основу ПВМ-овог улаза радног циклуса.
Отворена петља за затварање ограничења преласка петље (Хом), време поравнања (ТАХКХ) и брзина убрзања (РАЦЕ) могу се подесити путем ОТП конфигурација.
Избор прага примопредаје (КАКО,) обично се одобрава проценом покушаја и грешака. Циљ би био да се преферира толеранција примопредаје која би могла бити што мање изводљива и омогућава мотору да без напора и верно прелази између убрзања отворене петље и убрзања затворене петље.
Мотори са повећаном брзином (максималне брзине) захтевају супериорну толеранцију примопредаје због чињенице да мотори са повишеном брзином садрже смањени Кт, отуда приступачнији БЕМФ.
Табела 3 приказује подесиве преференције за толеранцију примопредаје. Доказане су највеће брзине у електричном Хз као референца за помоћ при одабиру жељене брзине примопредаје за одређени поднесак.

Избор времена поравнања (ТАХКХ) и брзине убрзања (РАЦЕ) могу чак бити зависни од испитивања покушајима и грешкама.
Мотори са већом инерцијом обично захтевају продужено време поравнања и спорију брзину убрзања за разлику од мотора са малом инерцијом који обично захтевају краће време поравнања заједно са процентом бржег убрзања. Компромисе програма треба применити како би се искористила стабилност лансирања, за разлику од периода ротације.
ТИ одобрава почев од одлучивања о мање интензивним конфигурацијама (спорији РАЦЕ и значајан Тмигн) како би се угрозило време обртног момента као подршка максималној стопи испуњења.
Чим се опрема потврди за савесно извођење, екстра снажне конфигурације (већи РАЦЦ и мањи ТАХКХ) могу се користити за смањење момента појачавања и истовремено опрезно праћење стопе испуњења.
Табела 4 приказује подесива подешавања за ТА'г ,, и РАЦЕ.

Преостали део објашњења у вези са овом БЛДЦ ИЦ без сензора је дат у овом оригиналном листу података
Слободно коментирајте да бисте сазнали више о горе поменутим детаљима круга покретачког мотора БЛДЦ мотора без сензора
Пар: 12В круг за напајање ЛЕД руксака Следеће: Квадкоптер даљински управљачки круг без МЦУ-а