
ДО робот је електро-механичка машина која је усмерена струјним кругом или рачунарским програмом.Роботи су разменили људе у обављању непрекидних и опасних задатака које људи одлуче да не раде. Поклон роботи су класификовани у различите категорије на основу њихових карактеристика и перформанси попут индустријских робота, комерцијалних робота, сервисних робота, мобилних робота. Овде је сервисни робот који непрекидно обавља задатке да дочека људе покретом руке који представља „Намасте“ кроз снимљену гласовну поруку. Генерално, када људе позивамо кући, забаве, брачне функције, канцеларију итд. Морамо да договоримо особу да их поздрави и позове на улаз. Ако је количина људи мала, онда је задатак једноставнији. Али ако поздравите стотине људи, онда је задатак тежак. Да бисмо превазишли овај проблем, ево пројекта, наиме робота намасте са гласовном контролом.

Намасте Робот
Намасте Робот са гласовном контролом
Главни концепт овог Намасте-а пројекат робота је управљање разним серво моторима кроз Ардуино плочу. Овај робот скенира околне људе и окреће главу за око 180 °. Ако препозна некога у близини, онда пожели ту особу са Намастеом са обе руке притиснуте. То је традиционални начин да се пожеле људи у Индији. Тхе примене робота укључити у тржне центре, паркове, канцеларије како би привукли људе.
Блок дијаграм робота Намастае са гласовном контролом
Следећа слика означава блок дијаграм робота Намасте са гласовним управљањем. У овој врсти робота програмирају се гласовне команде. Читава развојна плоча може се повезати на заједничко напајање. Опис сваког блока је следећи. Тхе напајање даје напајање свим модулима. Ови модули захтевају струју у мА, а радни напон ће бити 5В.

Блок дијаграм робота Намастае са гласовном контролом
Ардуино Боард
Ардуино је једна врста алата заснован на једноставној плочи микроконтролера која се користи за контролу и осећај физичког света од стоног рачунара. За физичко рачунање постоје разне платформе микроконтролера. Важне карактеристике Ардуина су јефтин софтвер са отвореним кодом и проширивим софтвером. Ардуино софтвер је доступан као алат отвореног кода, а језик се може проширити кроз Ц ++ библиотеке.

Ардуино Боард
Пинг сензор
Сензор за пинг користи СОНАР за контролу удаљености објекта у његовој близини. Ово сензор се користи као очи робота да осете препреку. На пример, сензор близине. Даје изврсну прецизност опсега и стабилна очитавања. На рад овог сензора не утичу црни материјал или сунчева светлост. Спецификације сензора пинга су напон 5В, струја 15мА, угао сензора НИЈЕ> = 15 и удаљеност откривања је 2 цм ~ 450 цм.

Пинг сензор
Повезивање сензора пинг-а са Ардуином приказано је испод. На располагању су четири пина за повезивање сензора пинга са Ардуино плочом. Четири пина на Ардуино плочи су ГНД, ВЦЦ, ЕЦХО и ТРИГГЕР. Клинови на плочи су Д0-Д13, у то су 12 и 13 пинови улазни и излазни пинови.
Ардуино микроконтролер нуди нам библиотеку серво управљања која нам омогућава да лако мењамо серво уређаје. У овом пројекту смо користили 5 серво сервера за регулацију кретања робота Намасте попут главе, десног лакта, левог лакта, десног рамена и левог рамена. Овде дигитални улазно / излазни пинови (Д5, Д6, Д9, Д10, Д1) означавају на Ардуино плочи повезану са серво моторима.
ИЦ за репродукцију гласа
Ова ИЦ репродукција гласа нуди снимљену поруку која се репродукује унапред дефинисаном брзином фреквенције. Репродукција се премешта на јединицу за појачавање звука.

ИЦ за репродукцију гласа
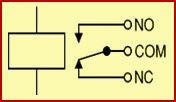
Релеј
ДО релеј је једна врста прекидача ради електрично. Проток струје кроз завојницу релеја ствара магнетно поље које позива полугу и мења контакте прекидача.

Релеј
Управљање гласом Намастае Робот ради
Рад робота Намасте може се извршити у поступном поступку заједно са симулираним резултатима. Када је робот Намасте у првом стању, онда серво мотор с робота 2, 3, 4, 5 су у ИСКЉУЧЕНОМ или нултом стању. Глава робота Намасте се смењује од центра надесно, лево и затим назад ка центру услед окретања серво мотора1 од 0 ° -180 °. Кретање главе робота прецизира да робот Намасте тражи препреку. Када сензор за пинг открије било коју препреку, положај главе робота се враћа у средину, а серво мотор1 реликвије под углом од 90 ° и искључују. Активира се у НИСКОМ стању.
Када се серво мотор1 искључи, преостали мотори попут серво4 и серво5 се УКЉУЧЕ. Сигнална линија се активира за десно и лево раме робота Намасте. Сада руке робота могу да направе покрет. Рамени серво мотори повезани су са дигиталним улазним и излазним пиновима Ардуино плоче. Али, сигналне линије или ови пинови биће високи, а положај сервоа промењен на 90 °. Сада се серво4 и серво 5 ИСКЉУЧУЈУ.
На крају можемо закључити да је главни циљ ове контроле гласа робот треба да пружи услугу љубазног дочека људи откривајући људе који ходају испред ње. Може се користити на разним јавним местима попут паркова, тржних центара, забава итд. Надамо се да сте боље разумели овај концепт. Даље, било која питања у вези са овим концептом или заснованим на ардуину пројекти робота , дајте своје драгоцене предлоге коментаром у одељку за коментаре испод.
Фото кредити:
- Ардуино Боард ниацкневсандвиевс
- Пинг сензор паралакса
- ИЦ за репродукцију гласа кеалаб
- Релеј несретни
- Намасте Робот цанстоцкпхото
![Тачкасте контактне диоде [историја, конструкција, коло примене]](https://electronics.jf-parede.pt/img/electronics-tutorial/38/point-contact-diodes-history-construction-application-circuit-1.jpg)







{kind=link}
{kind=link}
{kind=link}
{kind=link}