Електромеханички уређај или машина који се користе у разне сврхе и којима се управља и њиме се управља помоћу техника програмирања назива се робот. Роботи су различитих типова на основу њихових апликација као што су индустријски роботи , војни роботи, свемирски роботи, домаћи роботи, роботи који шетају, пењачки роботи итд. Најнапреднији пројекти роботике се развијају за ефикасну употребу у различитим областима за неколико примена. У овом чланку, разговарајмо о посебној врсти пројеката роботике, наиме роботско возило које прати линију са механизмом за ходање и пењање.
Роботско возило

Пројекти роботике за студенте инжењерства
Тхе роботска возила су посебне врсте машина дизајниране за самостално кретање по земљи, ваздуху, под водом и у свемиру без човека на броду. Овим роботским возилима управља и њима управља разни сензори засновани на системима управљања. Роботска возила су посебно дизајнирана за употребу у условима у којима људска бића не могу да уђу, као што су пожарне несреће, врло високе или врло ниске температуре итд.,.
Робот за следбенике линија

Робот за следбенике линија
Роботско возило које се креће пратећи одређену путању или линију можемо назвати а робот следбеник линије . Ови роботи за праћење линија посебно се користе у индустријским апликацијама за посебне намене, као што је транспорт различитих делова или машина или возила (аутомобили, бицикли итд.), Пратећи одређену линију од једне тачке (производна јединица) до друге тачке (склопна јединица) .
Нормална линија која прати роботско возило са посебним карактеристикама попут механизма за ходање и пењање једна је од занимљиви пројекти роботике за студенте инжењерства , који се могу користити за неколико апликација. Једноставни кораци за дизајнирање линијског робота са механизмом за ходање и пењање приказани су испод.
Корак 1: Прикупљање потребних компонената

Електричне и електронске компоненте
Компоненте потребне за пројектовање линије која прати роботско возило са механизмом за ходање и пењање процењују се на основу примене робота. Окупите све електричне и електронске компоненте као што су отпорници, кондензатори, ИЦ предајници, једносмерни мотори, транзистори, тело робота и фотодиоде са одговарајућим оценама, заједно са осталим деловима као што су картон, вијци, навртке, алуминијумске траке итд., Према захтеву.
Корак 2: Анализа кола за робота који прати линију

Линија након роботског возила проширива на блок дијаграм робота за ходање и пењање
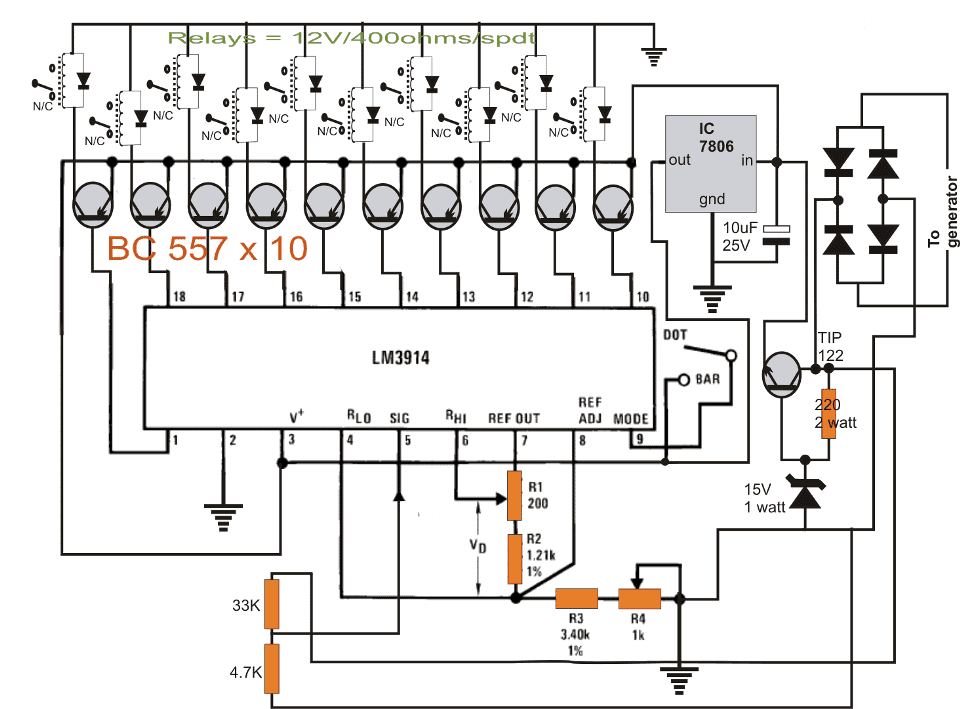
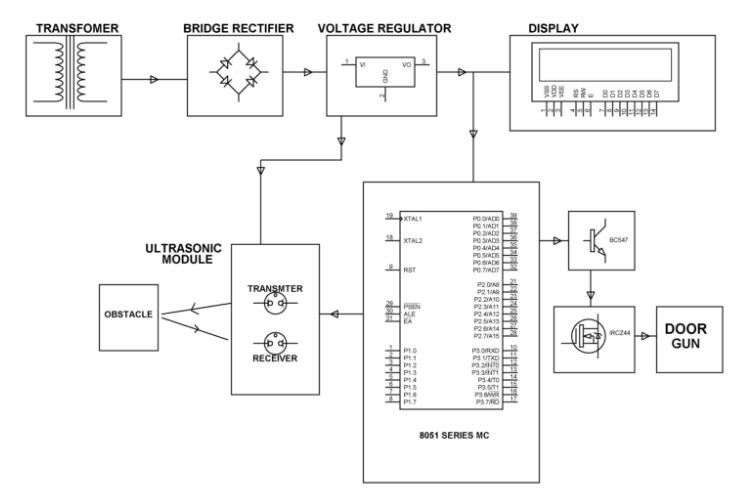
Првенствено дизајнирајте блок дијаграм пројектних кола са различитим блоковима као што је блок за напајање , ИР ЛЕД и фотодиодни блок и тако даље. Након сакупљања компонената, анализирајте дизајн кола на основу рада различитих компонената које се користе. Затим поставите компоненте преко плоче за лемљење према дијаграму кола, користећи повезујуће жице за испитивање рада кола пре склапања кола на ПЦБ. Тестирањем струјног круга преко плоче за лемљење ако су потребне било какве промене у кругу или називима компонената, тада се могу лако извршити измјене без губљења новца и времена за замјену компонената или промјену дизајна кола.
Корак 3: Састављање и лемљење компонената

Линија након роботског возила проширива на пројекат робота за ходање и пењање
Стога, након анализе дизајна кола, саставите компоненте према схеми кола преко ПЦБ-а. Затим лемите круг помоћу пиштоља за лемљење и жице за лемљење пратећи одговарајуће смернице за лемљење. Правилно повежите све делове робота да бисте формирали робота који прати линију, као што је приказано на горњој слици, и по потреби залепите делове роботског возила.
Корак 4: Рад линијског следбеника
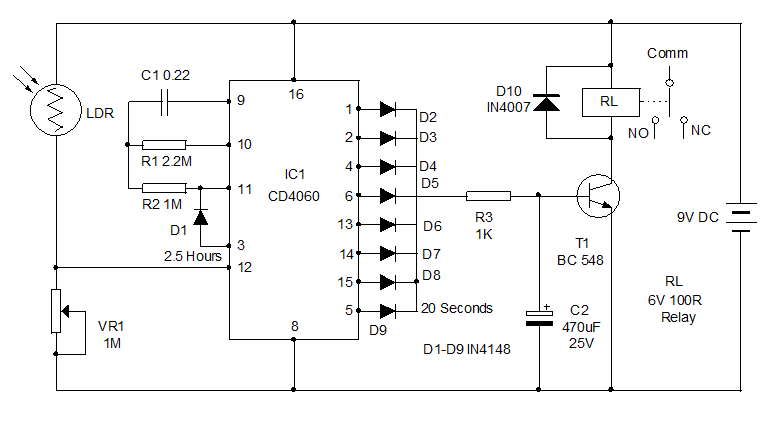
ИР предајник и фотодиода се користе као фотосензор пар који се може користити за откривање одређене путање за кретање робота који прати линију током ходања и пењања по зидовима. Пар фотосензора даје одговарајуће сигнале за пребацивање транзистора за погон мотора робота који прати линију.
Корак 5: Роботско возило с следбеницима са механизмом за ходање и пењање
Бројни су пројекти роботике за студенте инжењерства у којој је следбено роботско возило са механизмом за ходање и пењање иновативан и занимљив пројекат који сами дизајнирате користећи нашу бесплатну е-књигу за дизајнирање електронских пројеката.
Тхе примена роботике се брзо повећава у нашем свакодневном животу за неколико функција попут индустријске примене, премештања или дизања тешких производа, транспорта унутар ограниченог подручја пратећи одређени пут, обраде, заваривања, кућних апарата, аутономних робота, војних робота за смањење људских учешће и опасност, сараднички роботи за интеракцију са човеком, као и за обављање неколико задатака, образовни роботи, мобилни роботи и хуманоиди.
Да ли сте заинтересовани за дизајн електронски пројекти самостално? Да ли знате како да развијете хуманоидне роботе? Ако желите да сазнате више о пројектима роботике за студенте инжењерства, можете да упутите своје упите, коментаре, идеје и предлоге у одељак за коментаре у наставку за било какву техничку помоћ.