У овом посту истражујемо техничке спецификације и детаље о пиноуту ИЦ Л293, који је свестрани четворострани ИЦ-покретачки модул и може се користити за примену многих занимљивих мотора коло засновано на возачу примене, као што су погонски мотори, соленоиди и друга индуктивна оптерећења (4 јединице одвојено или у паровима кроз пусх-пулл режим).
Како то ради
ИЦ Л293 у основи укључује два пара излаза који се могу независно користити за управљање два одвојена оптерећења у режиму потискивања или у двосмерном начину, који се такође назива режимом тотем-пола. Алтернативно, ових пар пара излаза могу бити појединачно користи се за једносмерно руковање 4 појединачна оптерећења.
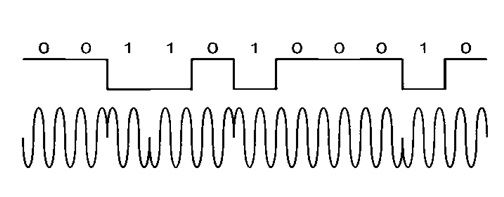
Горе наведени поступци оптерећења контролишу се помоћу одговарајућих улазних пиноута, покренутих из спољашњег кола осцилатора или а ПВМ извор .
На пример, ако је теретом потребно управљати на начин тотем-стуба, одговарајући улази две фазе покретача ИЦ-а могу се активирати са спољног осцилатор као на пример кроз неколико НАНД капија , при чему би једна капија могла бити ожичена као осцилатор, а друга као претварач.
Два антифазна сигнала са ових НАНД капије тада би се могао повезати са улазима Л293 за управљање релевантним излазима на начин тотем-стуба (пусх-пулл), што би заузврат покретало повезано оптерећење на исти начин.
Задатак пиноута на ИЦ Л293
Сада ћемо научити пиноут функције ИЦ Л293 позивајући се на следећи дијаграм и из следећег објашњења:

Пин # 2 је управљачки улаз, који контролише излазни пин # 3.
Слично томе, пин # 7 је управљачки улаз за излазни пин # 6.
Пин # 1 се користи или за омогућавање или онемогућавање горе наведених скупова пиноута. Позитивно на пин # 1 држи горње скупове пиноута омогућеним и активним, док их негативно или 0В напајање тренутно онемогућава.
Потпуно идентично, Пин # 15 и пин # 10 постају контролни улази за одговарајуће излазе пин # 14 и пин # 11 и они остају у функцији све док је пин # 9 у позитивној логици и онемогућен када је 0В логика примењено на овом пиноуту.
Као што је претходно објашњено, пин # 3 и пин # 6 могу се користити као парови тотем пола, напајањем антифазног логичког сигнала на њихов улазни пин # 7 и пин # 2. Значи, када се пин # 2 напаја позитивном логиком, пин # 7 мора бити у негативној логици и обрнуто.
То ће омогућити да излази пин 6 и пин 3 управљају повезаним оптерећењем у одговарајућем смеру, и обрнуто, када се улазни логички сигнали преокрену, поларитет оптерећења је такође обрнут и почеће да се окреће у супротном смеру.
Ако се овај редослед брзо пребаци, онда терет делује на одговарајући начин амо-тамо или на притисак.
Горња операција се може поновити и на други бочни пар управљачких програма.
Вцц или позитивни улази напајања за ИЦ конфигурисани су независно за два различита улаза напајања.
Пин # 16, (Вцц1) се користи за руковање пиновима за омогућавање и за управљање другим интерним логичким фазама ИЦ, а овај се може испоручити са улазом од 5В, иако је максимално ограничење 36В
Пин # 8, (Вцц2) се посебно користи за напајање мотора и може се напајати било чиме од 4,5В до 36В
Електричне спецификације ИЦ Л293
ИЦ Л293 је дизајниран за рад са било којим напајањем између 4,5 В и 36 В, са максималним спецификацијама руковања струјом не већим од 1 ампера (2 Амп у импулсном режиму, највише 5 мс)
Стога се било којим оптерећењем у оквиру горе поменутих спецификација може управљати преко разматраних излаза ИЦ Л293.
Логика улазног управљања не сме бити премашена изнад 7В, било као континуирано напајање или ПВМ напајање.
Коришћење Л293 ИЦ за примену управљања мотором
Сада научимо како да имплементирамо кола управљачког склопа мотора помоћу ИЦ Л293 кроз различите начине рада и користећи чак 4 мотора са одвојеним управљачким уређајем.
У нашем претходном посту проучавали смо пиноут и детаље функционисања ИЦ Л293, овде сазнајемо како се исти ИЦ може користити за управљање моторима кроз одређене режиме и конфигурације.
Начини управљања
ИЦ Л293 се може користити за управљање моторима у следећим режимима:
1) 4 мотора кроз независне ПВМ улазе.
2) 2 мотора у двосмерном или тотемском полу са режимом брзине преко ПВМ-а
3) Један двофазни БЛДЦ мотор који користи ПВМ улаз
Слика испод показује како се ИЦ може користити за управљање моторима са независним управљачима, као и како се један мотор може користити за постизање двосмерна контрола :

Лева страна ИЦ приказује мотор који је конфигурисан да ради у двосмерном режиму. Да би се осигурало да се мотор окреће у једном од изабраних праваца, пин # 1 и пин # 7 морају се применити са антифазним 5В ДЦ улазом. Да би се променио смер ротације мотора, овај поларитет од 5 В могао би се променити на поменутим улазним пиновима.
Пин # 1 мора се држати на високој логици како би мотор и ИЦ функционисање остали омогућени, логика 0 овде ће тренутно зауставити мотор.
Опскрба на управљачким улазним пиновима може бити у облику ПВМ-а, за шта се може додатно користити управљање брзином мотора од 0 до максимума једноставно променом радног циклуса ПВМ.
Десна страна ИЦ приказује распоред у коме се неколико мотора контролише независно преко независних ПВМ улаза на одговарајућем пину # 15 и пину # 10.
Пин # 9 мора се држати на високој логици како би мотор и ИЦ функционисали. Нула логике на овом пиноут-у ће тренутно зауставити и онемогућити функцију прикључених мотора.
Будући да су леви и десни бочни делови ИЦ-а идентични са детаљима функционисања пиноута, приказани распоред мотора могао би се заменити преко одговарајућих пиноута како би се постигло идентично функционисање као што је горе објашњено, што значи да би два појединачна мотора могла бити повезана на лева страна ИЦ тачно онако како је на дијаграму имплементирана на десној страни ИЦ.
Слично томе, двосмерни систем би могао бити уграђен на десну страну пиноут-а ИЦ, управо онако како је постигнуто на левој страни ИЦ-а на горе приказаном дијаграму.
Горњи пример показује како се ИЦ Л293 може користити за појединачно управљање 4 мотора или 2 мотора у двосмерном режиму, и како се брзина такође може контролисати помоћу ПВМ напајања на одговарајућим улазним пиноутима ИЦ.
Коришћење Л293 за управљање двофазним БЛДЦ мотором

На горњој слици можемо видети како ИЦ Л293 може бити конфигурисан за управљање двофазним БЛДЦ мотором помоћу назначених пиноута и кроз неколико контролних улаза приказаних као контрола А и контрола Б.
Може се видети један двофазни мотор повезан преко излаза ИЦ, док су улази повезани низом НЕ капија који постају одговорни за креирање потребне антифазне улазне логике за управљање мотором.
Контролне тачке А и контролне Б могу бити подвргнуте наизменичној логици која омогућава да се двофазни мотор правилно ротира.
Поларитет наизменичне логике одређује смер ротације мотора.
Да би се постигла линеарна контрола брзине на мотору, ПВМ облик логике могао би се применити на улазима управљања А и управљања Б и његов радни циклус могао би се променити за постизање жељене контроле брзине на повезаном мотору.
Ако имате додатних сумњи у вези са техничким спецификацијама, табелом података или детаљима пиноута ИЦ-а, увек можете слободно коментарисати доле за тренутне одговоре.
Претходно: Бежични термометар који користи РФ везу од 433 МХз помоћу Ардуина Следеће: Универзални ЕСЦ круг за БЛДЦ и моторе алтернатора