У овом пројекту разговарамо о томе како контролишу брзину мотора користећи Ардуино ПВМ коло и како имплементирати контролу вожње уназад или смер у једносмерном мотору користећи Ардуино помоћу неколико прекидача са тастерима. Помоћу овог подешавања може се контролисати било којим јаким мотором до 30 ампера
Од странеАнкит Неги
Мотор је врло битна компонента у електричној и електроничкој индустрији, јер се користе као актуатори у многим областима.
Мотори су нам потребни за мале примене попут роботике, као и за подручја у којима се користе тешки мотори (индустрија итд.).
Сада се мотори који се користе за мале примене могу лако контролисати, јер не узимају пуно струје (мање од 2амп).
А овим моторима се лако може управљати помоћу микроконтролера попут ардуина са моторних возача попут Л298 или Л293Д .
Али мотори који се користе за тешке сврхе (веће од 10амп) не могу се контролисати користећи ове иц-ове јер могу да испоруче ограничену струју (мак 2амп). Па како се управља овим моторима?
Одговор је једноставан: помоћу релеја , који делује као прекидачи, односно пребацује велику струју помоћу мале струје. На овај начин се могу постићи две ствари:
1. Покретање самог нашег мотора велике струје.
2. Изолирање струјног круга, спречавајући тако било какве ударе.
Сада се сваки микроконтролер може користити за пребацивање ових релеја. Овде ћемо користити ардуино УНО.
КОМПОНЕНТЕ ПОТРЕБНЕ ЗА ОВАЈ ПРОЈЕКАТ:
1. АРДУИНО УНО: дати улазне логике примарној страни релеја.
2. СПДТ РЕЛЕЈ -2: потребна су два релеја за ротацију у оба смера. Контакти морају бити оцењени да би се носили са високострујним спецификацијама мотора

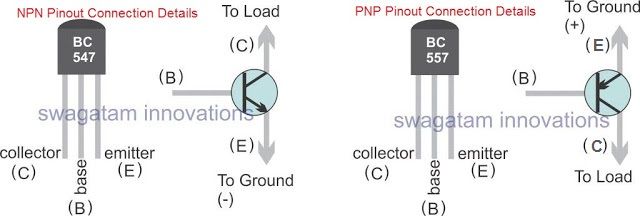
 3.Повер Мосфет: Можете користити ИРФ1010 МОСФЕТ
3.Повер Мосфет: Можете користити ИРФ1010 МОСФЕТ 
4. БАТЕРИЈА (12в): за напајање мотора.
5. ДВА тастера: за давање улаза у ардуино (тј. Када се притисне и када се не притисне)

6. ДВА 10К ОТПОРА: за дебоункинг (објашњено у наставку)

7. ПРИКЉУЧНЕ ЖИЦЕ: за успостављање веза.
ШЕМАТСКИ:

Успоставите везе како је приказано на слици.
1. Спојите нормално отворени терминал оба релеја на позитивни терминал батерије, а нормално затворени терминал на негативни терминал батерије.
2. Повежите мотор између преосталог терминала (од три) сваког релеја.
3. Повежите један терминал примарне стране релеја са излазним пиновима ардуина како је наведено у коду, а други терминал са масом.
4. Повежите један терминал оба тастера на 5в пин ардуино-а, а други терминал на улазне пинове како је наведено у коду.
4. ** Не заборавите да повежете отпоре јер су они веома важни за правилно функционисање овог кола, као што је објашњено у наставку:
ЗАШТО СУ ОТПОРИ ПОВЕЗАНИ?
Можда ћете открити да уопште није ништа повезано са улазним пиновима Ардуина, али то не значи да ови излази могу бити логичка нула када је назначени прекидач отворен
Уместо тога, подразумева да када је прекидач отворен ардуино може да преузме било коју случајну вредност између логике 0 и логике 1, што уопште није добро (ово се назива одскакањем).
Дакле, оно што овде желимо је да када ништа није повезано на улазни пин, тј. Дугме је отворено, ардуино узима 0 улаза са пин-а.
Да би се то постигло, иглица је преко отпорника директно повезана са масом пре тастера. Ако је директно повезан на масу без отпорника, велике су шансе да ће прегорјети јер ће пин бити кратко спојен на масу и тећи ће огромна количина струје. Да би се то спречило, између је повезан отпорник.
Овај отпорник назива се пуллдовн отпорником јер повлачи логику на пину до 0. А овај процес се назива дебоунцинг.
ШИФРА:
Спали овај код у свој ардуино.
int x// initialise variables
int y
int z
int w
void setup() {
pinMode(6,OUTPUT)//initialise pin 6 as output to RL1
pinMode(9,OUTPUT)//initialise pin 9 as output to RL2
pinMode(3,INPUT)//initialise pin 3 as input
pinMode(4,INPUT)//initialise pin 4 as input
pinMode(10,OUTPUT)//initialise PWM pin 8 as output to gate of mosfet
pinMode(A0,INPUT)//initialise pin A0 as input from pot.
Serial.begin(9600)
}
void loop() {
z=analogRead(A0)// read values from potentiometer in terms of voltage
w= map(z,0,1023,0,255)// map those values from 0 to 255
analogWrite(10,w)// write the mapped value to 10thpin as output
delay(1)//on time period of mosfet
analogWrite(10,w)
delay(1)//off time period of ,mosfet
Serial.println(z)//print value from pot to serial monitor
Serial.println(w)//print mapped value to serial monitor
x= digitalRead(3)
y= digitalRead(4)
if(x==0 && y==0){digitalWrite(6,LOW)//hault motor
digitalWrite(9,LOW)}
if(x==1 && y==0){digitalWrite(6,HIGH)// clockwise rotation of motor
digitalWrite(9,LOW)}
if(x==0 && y==1){digitalWrite(6,LOW)// anticlockwise rotation of motor
digitalWrite(9,HIGH)}
if(x==1 && y==1){digitalWrite(6,LOW)//hault motor
digitalWrite(9,LOW)
}
}
Ради (разумевање кода):
• КОНТРОЛА СМЕРА:
А. Када се оба тастера не притисну:
У овом стању, ардуино узима 0 улаза са оба пина. Као што је наведено у коду у овом стању, оба излазна пина дају 0 логике (ЛОВ):
иф (к == 0 && и == 0) {дигиталВрите (6, ЛОВ)
дигиталВрите (9, ЛОВ)}
Будући да је улазни напон на примару оба релеја нула, секундарни терминал оба остаје у нормално затвореном положају. Стога на оба терминала мотора постоји нула волти, што не доводи до ротације.
Б. Када се притисне тастер Кс, али се не притисне И:
У овом стању, ардуино узима 0 улаза са пин 4, али инпут1 са пин3. Као што је наведено у коду у овом стању, пин 6 треба да буде на логици 1 (ХИГХ), док пин 9 на логици 0 (ЛОВ):
иф (к == 1 && и == 0) {дигиталВрите (6, ВИСОКО)
дигиталВрите (9, ЛОВ)}
Будући да је улазни напон на релеј # 1 висок, прекидач овог релеја пребачен је у нормално отворено стање, док је улазни напон на релеј 2 низак, прекидач овог релеја остаје у нормално затвореном стању узрокујући 12в и 0в на терминалима мотора, што доводи до ротација мотора у једном смеру.
Ц. Када се притисне тастер И, али се не притисне Кс:
У овом стању, ардуино узима 1 улаз са пина 4, али улаз 0 са пина 3. Као што је наведено у коду у овом стању, пин 6 треба да има логику 0 (ЛОВ), док пин 9 логику 1 (ХИГХ):
иф (к == 1 && и == 0) {дигиталВрите (6, ЛОВ)
дигиталВрите (9, ВИСОКО)}
Будући да је улазни напон на релеј # 2 овог пута висок, прекидач овог релеја пребачен је у нормално отворено стање, док је улазни напон на релеј # 1 низак, прекидач овог релеја остаје у нормално затвореном стању узрокујући 12в и 0в на мотору стезаљке, узрокујући ротацију мотора у другом правцу.
Д. Када се притисну оба тастера:
У овом стању, ардуино узима по један улаз са оба пина. Као што је наведено у коду у овом стању, оба излазна пина дају 0 логике (ЛОВ):
иф (к == 0 && и == 0) {дигиталВрите (6, ЛОВ)
дигиталВрите (9, ЛОВ)}
Будући да је улазни напон на примару оба релеја нула, секундарни терминал оба остаје у нормално затвореном положају. Стога на оба терминала мотора постоји нула волта, што не доводи до ротације.
• КОНТРОЛА БРЗИНЕ:
Рецимо да је потенциометар у таквом положају када даје 0 волти као улаз на А0 пин ардуина. Због тога, ардуино мапира ову вредност као 0 и тако даје 0 као излазни ПВМ на пин # 10, тј.
аналогВрите (10,0) // запишите мапирану вредност у 10. пин као излаз
Стога капија МОСФЕТ-а добија 0 струје због које остаје искључена и мотор је у искљученом положају.
Међутим, како се лонац окреће и вредност лонца варира, напон на пин А0 такође варира, а та вредност се пресликава на пин # 10 с пропорционално повећањем ширине ПВМ, што доводи до тога да више струје тече кроз мотор и МОСФЕТ одвод, што заузврат омогућава сразмерно повећању брзине мотора, а исто се догађа и обрнуто.
Тако из горње дискусије можемо видети како се Ардуино може користити за контролу брзине као и смера (уназад уназад) јаког истосмерног мотора једноставним подешавањем наведеног лонца и помоћу неколико тастера.
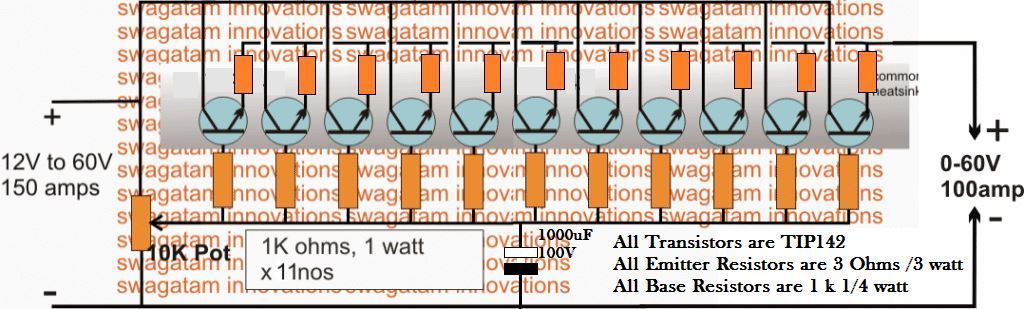
ажурирање : За мотор велике јачине струје, користите релеје од 12В / 30 ампера и БЈТ степене драјвера за рад ових релеја велике снаге како је приказано на следећем измењеном дијаграму:

Претходни: Круг сензора за паркирање уназад аутомобила са алармом Следеће: Ардуино ПВМ сигнални круг