
Обично роботи на даљинско управљање користе РФ кола, која имају недостатке ограниченог радног опсега, ограниченог управљања и ограниченог фреквенцијског опсега. Да бисте превазишли ове недостатке, Ланд Ровер са мобилним телефоном користи се роботско возило. Пружа предности роботске контроле, контролера без продора и до дванаест контролних система итд.
Иако су могућности и изглед уграђена роботика варирају у великој мери, сви роботи деле особине покретне, механичке структуре под неким обликом контроле. Контрола робота укључује три различите фазе, а то су перцепција, обрада и деловање. Обично су сензори постављени на робота. Перцепцију и обраду врши уграђени микроконтролер, а радња се изводи помоћу мотора.
Роботско возило Ланд Ровер са мобилним телефоном

Роботско возило Ланд Ровер којим управља мобилни телефон компаније Едгефккитс.цом
Главна намера овог пројекта је управљање роботском руком која је постављена на роботско возило помоћу мобилног телефона. Омогућава велики радни опсег и робусну контролу итд.
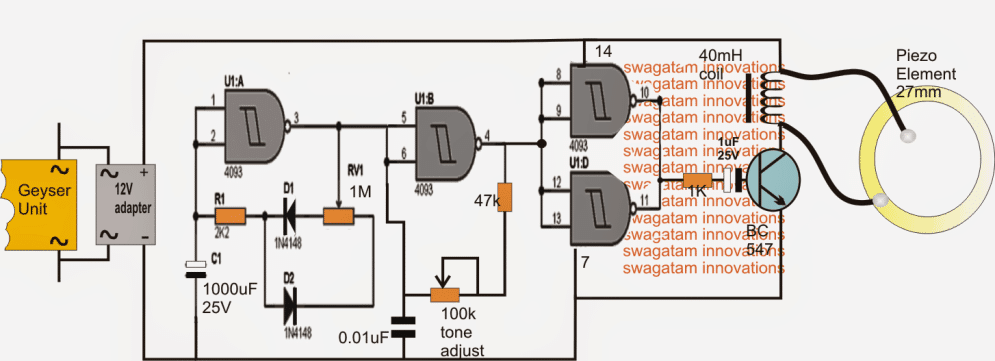
Блок дијаграм роботског возила Ланд Ровер којим управља мобилни телефон:

Блок дијаграм Ланд Ровера којим управља мобилни телефон
Главни градивни блокови су микроконтролер, мобител, ДТМФ декодер и круг истосмјерног мотора-возача. Мобилни телефон је најважнији део целокупног система, јер читав систем ради и активира га мобилни телефон. ДТМФ (двотонски вишефреквентни) прима улазни сигнал са мобилног телефона и декодира га, а затим генерише 4-битни дигитални излаз на 8051 микроконтролер . Када ДТМФ декодер даје дигитални излаз, он такође генерише прекид сваки пут.
Микроконтролер је срце читавог система јер врши читаве радње управљања. Микроконтролер зависи од кода који генерише ДТМФ декодер за померање ровера удесно или улево и напред или назад ротирањем оба једносмерна мотора. Возач једносмерног мотора прима сигнале за активирање од микроконтролера у смислу ниске или високе логике, затим појачава и ротира два мотора у оба смера.
Контрола робота укључује углавном четири различите фазе: перцепцију, обраду радње и детекцију. У фази перцепције ако мобилни телефон прикључен на робота прими позив, тада притиском тастера на мобилном телефону декодира генерисани ДТМФ тон. Затим чип декодера прима звучни сигнал са мобилног телефона, а затим претвара ДТМФ тон у бинарни код, који се затим шаље на микроконтролер. У овом пројекту се користи МТ88710 ИЦ као ДТМФ декодер. У фази обраде, микроконтролер обрађује бинарни код који се добија од ДТМФ декодера. Тхе Микроконтролер је унапред програмиран у „Ц“ за извођење овог одређеног задатка према улазним битовима.
У фази акције ротација мотора зависи од улаза који даје микроконтролер. Два мотора једносмерне струје, сваки од 30 о / мин, користе се за ландровер, а покреће их ИЦ-покретач мотора. На сцени откривања и за откривање препрека, ан инфрацрвени предајник и пријемник користе се заједно са зујалицом. Када препрека дође испред робота, ИР предајник преноси ИР зраке на објекту, а затим објекат одбија ИР зраке у ИР пријемник. ИР пријемник затим прима ИЦ зраке да би активирао зујалицу.
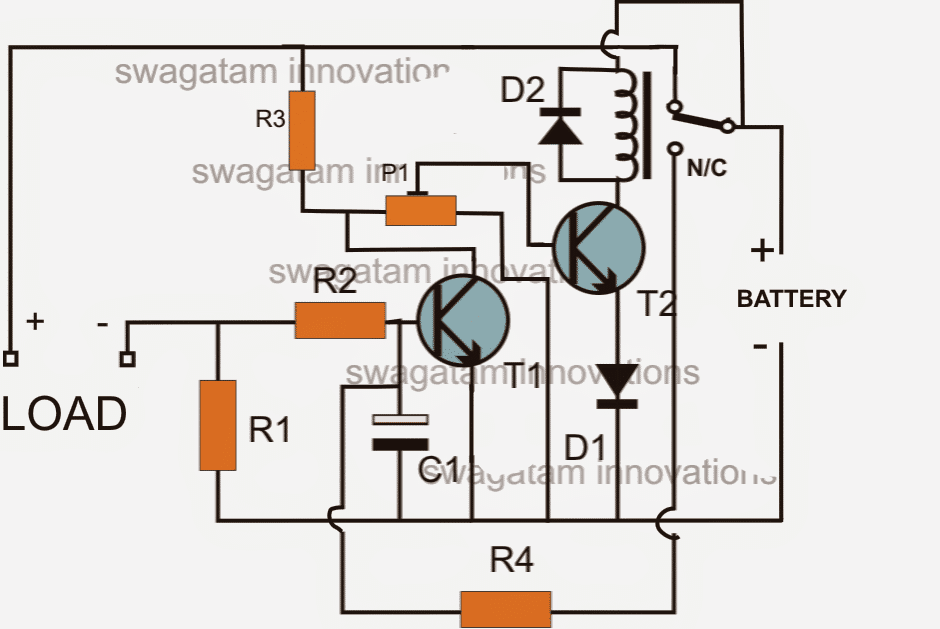
Кружни дијаграм роботског возила Ланд Ровер са мобилним телефоном:
Главне компоненте овог роботског ландровера којим управља мобилни телефон су микроконтролер, управљачки програм мотора и ДТМФ декодер. У овом пројекту се користи ДТМФ декодер серије МТ8870 који користи технике дигиталног бројања за откривање 16 парова ДТМФ тонова у 4-битни излаз кода. Уграђени диалтон круг елиминише претходно филтрирање. Ако се улазни сигнал даје на пин2, тада се препознаје да је улазна конфигурација ефикасна. 4-битни сигнал за декодирање тона ДТМФ преноси се на пин11 кроз излаз пина 14. Ови пинови су повезани са пиновима микроконтролера Пао, Па1, Па2 и Па3. Излаз микроконтролера са прикључних пинова ПД0 до ПД3 и ПД7 напаја се на улазе ИН1, ИН4 и омогућава пиновима ЕН1, ЕН2 управљачког програма мотора Л293Д ИЦ да погоните два једносмерна мотора .

Кружни дијаграм Ланд Ровера којим управља мобилни телефон
У овом колу, С1 прекидач се користи за ручно ресетовање. Излаз микроконтролера није довољан за погон једносмерних мотора, па су тренутни покретачи неопходни за ротацију мотора. Управљачки програм мотора Л293Д дизајниран је да обезбеди двосмерне погонске струје до 600 мА при напонима од 4,5 В до 36 В, што га чини лакша за погон једносмерних мотора. Моторни погон Л293Д састоји се од четири возача. Клинови од ИН1 до ИН4 & ОУТ1 и ОУТ4 су улазни и излазни пинови управљачког програма од 1 до управљачког програма 4. Погонске уређаје 1,2,3 и 4 омогућавају пински за омогућавање1 (ЕН1) и пински 9 (ЕН2). Када је улаз за омогућавање ЕН1 (пин1) висок, покретачки програми 1 и 2 су омогућени. Слично томе, улаз за омогућавање ЕН2 (пин9) омогућава управљачке програме 3.
Предности и мане:
Предности роботског ландровера којим управља мобилни телефон укључују бежично управљање системом за обезбеђивање и надзор, навигацију возилом засновану на 3Г технологији и неограничени опсег рада заснован на мрежи мобилног телефона. Недостатак укључује: трошкови наплате мобилних телефона су високи празне се мобилне батерије : проблем пражњења повезан са батеријама због губитка батерија због брзог пражњења, јер је оптерећење велика прилагодљивост: систем није прилагодљив свим мобилним телефонима, али они са прикљученим слушалицама могу се користити само.
Стога је овај пројекат робота којим управља мобилни телефон веома користан у војним апликацијама за управљање војним возилима помоћу мобилног телефона. У будућности можемо открити положај непријатеља уређивањем а бежична камера до роботског возила ланд ровер. Овај пројекат такође може бити користан академцима јер студенти могу научити различите терминологије и принципе предложене у овом пројекту. Овај пројекат ће помоћи студентима да додају своје иновативне мисли и идеје развијати пројекте роботике .
Фото кредити:
- Ланд Ровер којим управља мобилни телефон сантосхбанисетти
- Кружни дијаграм Ланд Ровера којим управља мобилни телефон енгинеерсгараге










{kind=link}